1.1 Обозначение и наименование ПО
1.2 Программное обеспечение, необходимое для функционирования ПО
2.1 Эксплуатационное назначение ПО
3 Условия выполнения программы
3.1 Минимальный состав аппаратных средств
3.2 Минимальный состав программных средств
3.3 Требования к персоналу (пользователю)
3.4 Описание основного окна программы
3.5 Основные настройки программы перед работой
4 Выполнение программы и сообщения оператору
4.1 Загрузка и запуск программы
4.2.1 Общая характеристика входной информации
4.2.2 Общая характеристика выходной информации
4.2.3 Измерения в движении
4.2.4 Измерения с остановкой
4.2.5 Диагностика
4.2.6 Подготовка текущих документов
4.2.7 Подготовка итоговых отчетных документов
4.3 Завершение работы программы
Наименование программного обеспечения: «Программное обеспечение системы дорожного контроля измерительной СДК.Ам» (сокращенно - ПО Системы).
Система дорожного контроля измерительная СДК.Ам предназначена для измерения осевых нагрузок и массы автотранспортных средств (ТС) в движении и c остановкой каждой оси на грузоприемной платформе, в том числе автоцистерн, перевозящих жидкие грузы.
Обозначение версий программ имеет общепринятую для программных средств структуру: X.Y.Z.W, где цифры: X – версия major, Y– подверсия minor, Z – выпуск release, W – сборка build отражают развитие ПО. Пример обозначения программы дан ниже в п 3.4 в заголовке основного окна программы.
1.2 Программное обеспечение, необходимое для функционирования ПО
ПО функционирует на персональном компьютере в среде под управлением операционной системы типа Windows 7, Windows 10, Windows 11.
ПО функционально разделено на метрологически значимые (МЗ) и метрологически не значимые (МНЗ) части. МЗ часть ПО обеспечивает съем данных с грузоприемного устройства (ГПУ), их обработку, формирование результатов измерений, вывод их на экран, передачу значений результатов измерений и управляющих сигналов в МНЗ часть ПО. Основная программа МЗ части ПО - Klient_car (реализация технологии Клиент).
МНЗ часть ПО осуществляет прием результатов измерений, взаимодействие со вспомогательным оборудованием на основе управляющих сигналов и команд оператора, ввод сопроводительной информации о ТС и сохранение в базе данных (БД). Основная программа МЗ части ПО - Server_car (реализация технологии Сервер). Оператор работает только с программой Server_car, которая сама связывается с программой Klient_car для реализации функций измерений.
Измерительные функции ПО реализованы
в режиме реального времени. Работа ПО
непрерывная, круглосуточная.
2.1 Эксплуатационное назначение ПО
ПО предназначено для управления работой Системы и реализации измерительных процедур, включая цифровую обработку результатов измерений нагрузок на весоизмерительные датчики грузоприемного устройства с целью определения весовых параметров ТС при взвешивании в движении или с остановкой каждой оси на грузоприемном устройстве.
Реализация измерительных процедур включает в себя:
- съем измерительных данных с ГПУ;
- определение весовых и вспомогательных параметров ТС при взвешивании в движении или с остановкой каждой оси на грузоприемном устройстве;
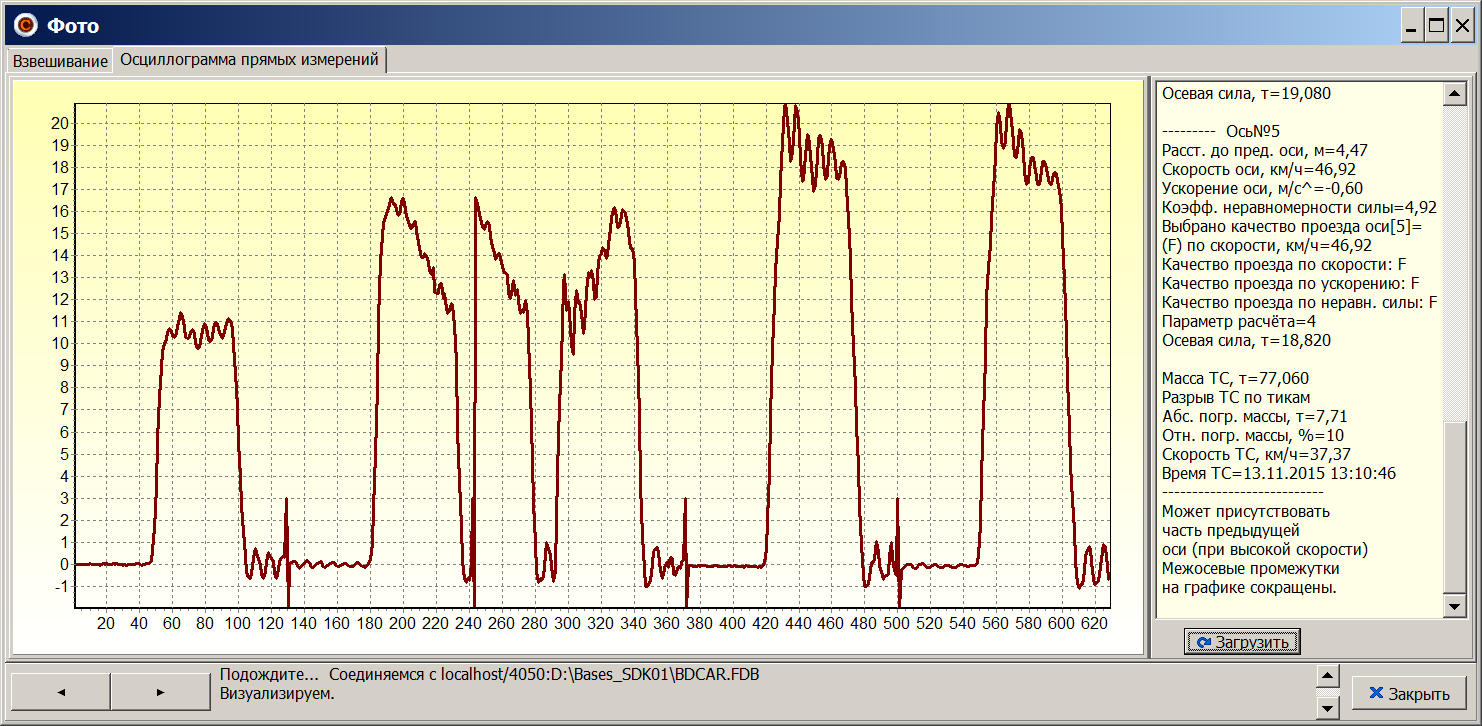
- анализ измерительных сигналов нагрузок на весоизмерительные датчики ГПУ с целью определения качества (характеристик неравномерности) проезда.
Общие вспомогательные процедуры Системы:
- отображение результатов.
- передача результатов измерений для сохранения в базе данных (БД).
- подготовка и сохранение параметров Системы.
- защита и идентификация ПО.
Имеются три основные функции Системы: взвешивание ТС в движении, взвешивание ТС с остановкой, диагностика измерительных каналов.
В режиме измерения в движении Клиентом реализуются следующие функции Системы:
- автоматическая установка нуля и слежение за нулем;
- обнаружение наезда оси ТС, определение скорости каждой оси, межосевых расстояний, определение полного проезда ТС, измерение осевых нагрузок на дорожное покрытие, массы движущегося ТС;
- определение пределов допускаемой погрешности измерений каждой оси и массы на основе анализа характеристик проезда.
В режиме измерения (взвешивания) с остановкой каждой оси ТС на ГПУ программой Klient_car реализуются следующие функции:
- выбор числа осей и задание расстояний между осями;
- полуавтоматическая, автоматическая установка нуля и слежение за нулем;
- ручной, полуавтоматический и автоматический режимы измерений:
в ручном режиме появляется кнопка ручной фиксации веса, активная только после установки каждой оси на грузоприемную платформу и при стабилизации показаний,
в полуавтоматическом режиме по команде оператора «Измерить ось» значение осевой нагрузки ТС определяется автоматически при стабилизации показаний,
в автоматическом режиме после установки каждой оси на грузоприемную платформу значение осевой нагрузки ТС определяется автоматически при стабилизации показаний;
- диагностика измерительных каналов ГПУ с раздельной индикацией нагрузки на каждый датчик и оценкой среднеквадратичного отклонения, а также максимального и минимального отклонений значений от среднего по выборке измерений.
Для каждого режима выполняется также:
- формирование результатов измерений с указанием даты и времени, вывод на экран, автоматическая передача их в базу данных;
- автоматическая передача в Сервер
управляющих сигналов.
Клиент определяет качество проезда ТС, с учетом значений осевых нагрузок, а также определенных значений скорости каждой оси и характера изменений осевых нагрузок при проезде оси ТС через ГПУ. В соответствии с математической моделью рассчитывает ожидаемые абсолютные погрешности измерений осевых нагрузок ТС, на основании которых автоматически определяет допускаемые относительные погрешности измерений осевых нагрузок и массы ТС. Определение скорости и межосевых расстояний ТС в движении является вспомогательной сервисной функцией ПО.
Функции, выполняемые МНЗ частью ПО, реализованные в Сервере:
- определение (уточнение) типа ТС;
- ввод оператором сопутствующей информации о ТС, отображение на экране ПК сохраненных данных с визуальным отделением данных, полученных из Клиента;
- формирование и печать оперативных и отчетных документов;
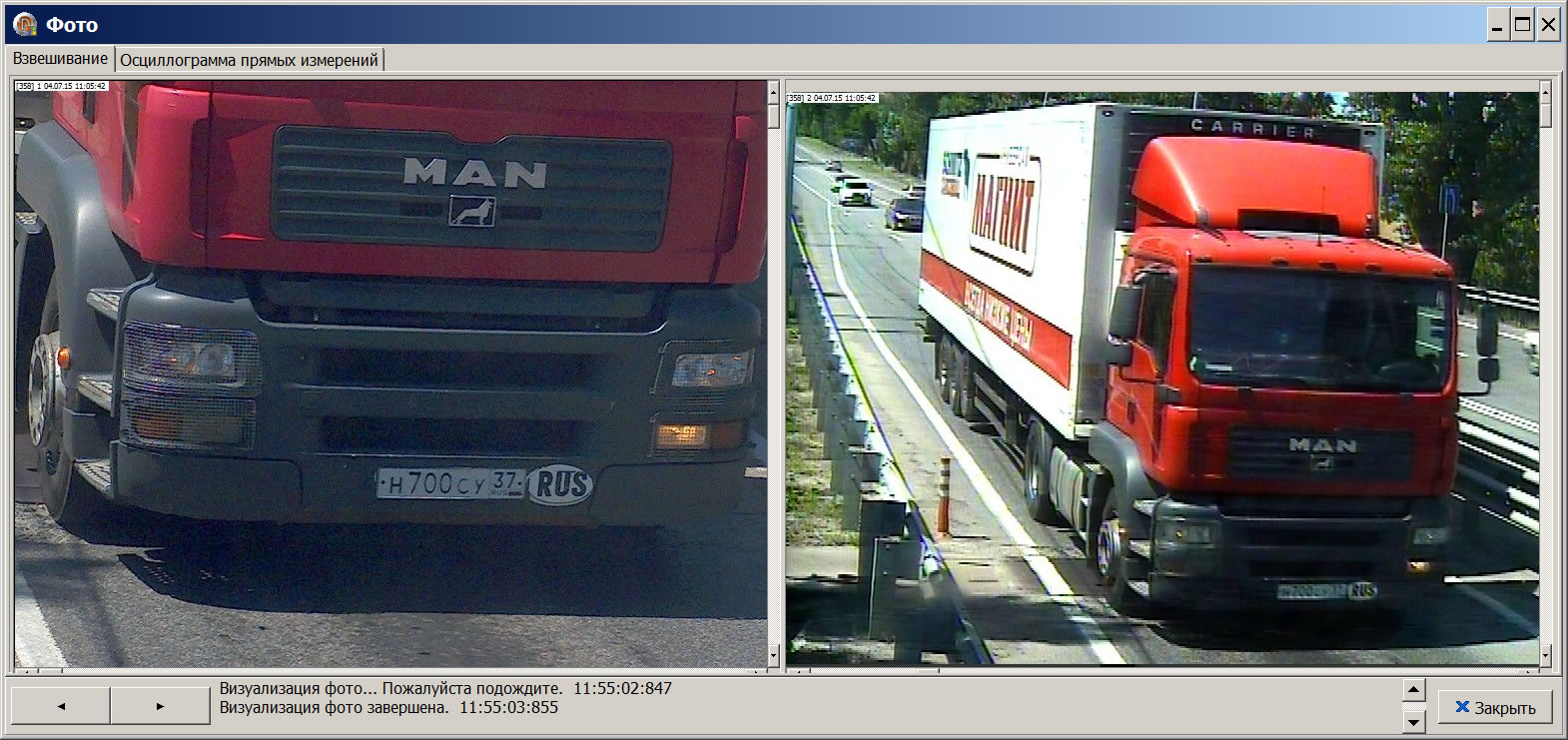
- автоматическая запись изображения ТС в момент наезда первой оси на ГПУ при наличии соответствующего комплекта оборудования;
- автоматическое управление движением ТС на основании управляющих сигналов Клиента посредством светофоров и громкой связи при наличии соответствующего комплекта оборудования;
- идентификация ТС при наличии соответствующего комплекта оборудования, средств идентификации и данных;
- общий контроль над функционированием Системы (с выдачей сообщений об ошибках).
ПО Системы дополнено сервисной функцией автоматической проверки соответствия измеренных значений осевых нагрузок и массы ТС требованиям действующих нормативных документов (ограничивающих массы и нагрузки осей ТС на дорожное покрытие). Обеспечено также формирование и ввод в базу данных (архив) дополнительных сведений о ТС - характеристиках груза, данных о перевозчике и маршруте движения.
В ПО реализована также процедура
Диагностика, которая
обеспечивает вывод на экран измерительных
сигналов датчиков и служит для контроля
за функционированием измерительной
аппаратуры.
3 Условия выполнения программы
3.1 Минимальный состав аппаратных средств
3.1.1 Система состоит из ГПУ, вмонтированного в дорожное полотно, кабельной электрической линии связи в комплекте с адаптером, компьютера и блока питания ГПУ, размещенных в стационарном помещении. Зона весового контроля включает в себя ГПУ и подъездные участки дороги. ГПУ состоит из неподвижной рамы и грузоприемной платформы, подвешенной на четырех весоизмерительных датчиках растяжения. Измерительная аппаратура ГПУ включает в себя: весоизмерительные тензорезисторные датчики растяжения с цифровыми преобразователями и коммутатор, обеспечивающий передачу электрического питания датчикам и передачу по линии связи результатов измерений в виде цифровых данных в компьютер.
3.1.2 ПО СДК.Ам функционирует на офисном или промышленном IBM совместимом компьютере под управлением ОС семейства Windows. Требования к конфигурации компьютера изложены в «Руководстве по эксплуатации».
3.1.3 Система может быть оснащена устройством ввода и обработки аналогового видеосигнала (модификация В) для передачи в ПО Системы и отображения на экране видеоизображения зоны взвешивания, а также записи в файл и сохранения в БД изображения ТС в момент наезда первой оси на грузоприемную платформу.
Система может быть дополнительно оснащена устройством управления движением потока ТС (модификация У), и автоматического оповещения по «громкой связи» о проезде ТС с превышением весовых параметров установленных нормативными документами норм с выделением таких ТС в БД.
Система может быть дополнительно оснащена устройством идентификации ТС (модификация И), при движении через зону взвешивания.
3.1.4 Технические средства более подробно охарактеризованы в «Руководстве по эксплуатации». Функции видеонаблюдения и управления движением ТС с помощью светофоров и идентификации ТС (в модификациях В, У, И) программно реализованы в программе Server_car.
3.1.5 Работа на СДК.Ам осуществляется только после установки электронного ключа защиты, индивидуально подготовленного для данного экземпляра Системы. Электронный ключ - это устройство, которое подсоединяется к USB порту компьютера. Защищаемые приложения «привязываются» к информации, записанной в электронном ключе. Запуск программы без электронного ключа невозможен.
3.1.6 МЗ часть ПО связана с аппаратными измерительными средствами ГПУ и не функционирует, если они отключены.
3.2 Минимальный состав программных средств
ПО Системы условно разделено на объекты Клиент1, Клиент2 и Сервер. Сервер - это объект, предоставляющий сервис другим объектам по запросам своих клиентов.
Объект Клиент состоит из основной программы - исполняемый файл Klient_car и файлов, содержащих метрологические и вспомогательные данные. Объект Сервер состоит из основной программы Server_car и вспомогательных программ и файлов.
Программы Klient_car и Server_car, а также соответствующие файлы данных устанавливаются в разных папках (каталогах): СДК-Измерения и СДК-Оформление.
Конфигурация Системы определяется настроенными и зафиксированными связями между программами Klient_car и Server_car. В типовой конфигурации Системы используются две программы Klient_car, работающие каждая со своим ГПУ и передающие данные в одну программу Server_car. Две программы Klient_car могут быть связаны с соответствующими весами, предназначенными для взвешивания на въезде и выезде при использовании на предприятиях в качестве весов для торговых или товарно-обменных операций. Второй вариант использования в качестве выполнения функций контроля весовых параметров ТС один клиент выполняет предварительное взвешивание, а второй контрольное взвешивание.
Программа Server_car постоянно связана с программой (ми) Klient_car . При этом программа Server_car может только направлять запросы в программу Klient_car, никак не воздействуя на данные Klient_car. Программа Server_car принимает от программы Klient_car результаты измерений, управляющие сигналы и дополнительные данные, связанные с фиксацией команд оператора.
Результаты измерений, сохраненные в БД, доступны в режиме просмотра для нескольких экземпляров программ Server_car.
3.3 Требования к персоналу (пользователю)
ПО предназначено для эксплуатации в организациях, имеющих подготовленных сотрудников. Умение работы на персональном компьютере под управлением операционной системы Windows является обязательным. Оператор производит взвешивание ТС в предусмотренных режимах и просматривает информацию о ТС в архивах - базе данных (БД). В соответствии с общими функциями постов весового контроля при оформлении допускается вводить дополнительные данные о технических характеристиках ТС из справочника ТС, что подразумевает редакцию расстояний между осями. Такая процедура контролируется программой и после окончательного оформления ТС, соответствующие значения фиксируются и не могут быть отредактированы. При этом весовые параметры ТС не изменяются.
Режим работы ПО при измерениях в движении – автоматический. Особенностью взвешивания с остановкой ТС на ГПУ является не полностью автоматический режим. В этом случае ответственность за принятие решения о приемлемости результатов измерений ложится на оператора.
Настройка на состав технических средств выполняется наладчиком организации-изготовителя при сдаче объекта в эксплуатацию.
Программные настройки, обеспечивающие удобство работы оператора осуществляет руководитель группы эксплуатации в соответствии со своими полномочиями.
Требования и условия технического и технологического характера изложены в «Руководстве по эксплуатации». Сюда относятся обеспечение функционирования аппаратных средств и требования к участкам дороги, примыкающим к ГПУ.
3.4 Описание основного окна программы
Управление Системой осуществляется с помощью клавиатуры, мыши компьютера и функций диалогового интерфейса, сформированного в программном обеспечении. На экране монитора в окне программы Server_car отображаются различные элементы интерфейса с необходимой поясняющей информацией. Основные из них следующие:
Меню – список (обычно расположенный вертикально), при щелчке по элементам которого, производится действие (в частности установка опции) или открытие другого меню (списка).
Кнопка – область экрана (обычно прямоугольная), при щелчке мышью по которой производится связанное с кнопкой действие.
Окно – ограниченная область экрана (окно можно перемещать по экрану, удерживая мышкой его заголовок).
Вкладки – окна, имеющие «корешок», при щелчке мышью по которому окно открывается, перекрывая соседние окна.
Список – набор элементов (строк текстов), выбираемый после щелчка мышью по стрелке справа от окошка.
Поля – окна для ввода или вывода информации (в таблице – это пересечение строки и столбца).
Фильтры – признаки, условия для отображения части данных (выборки из данных).
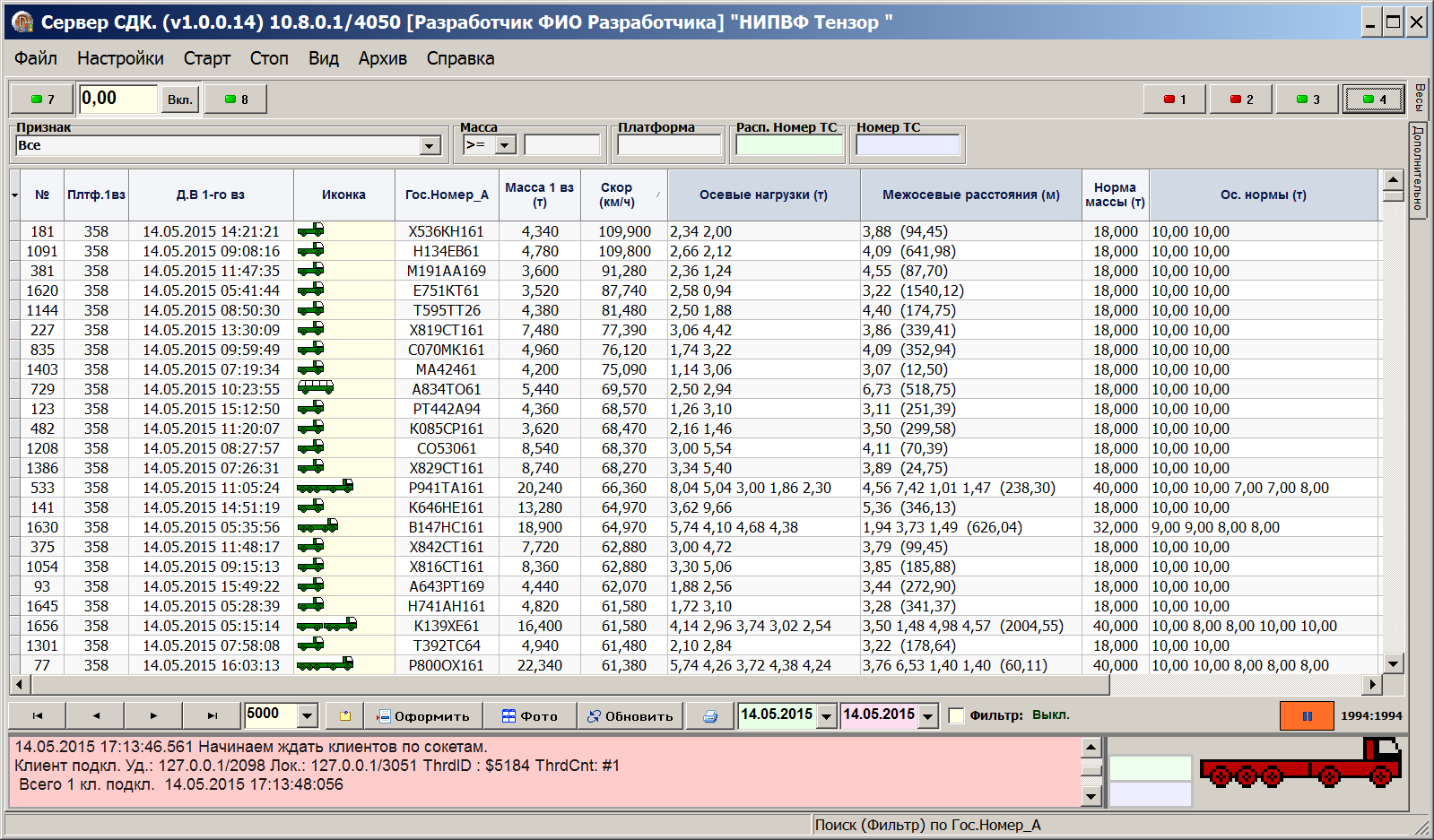
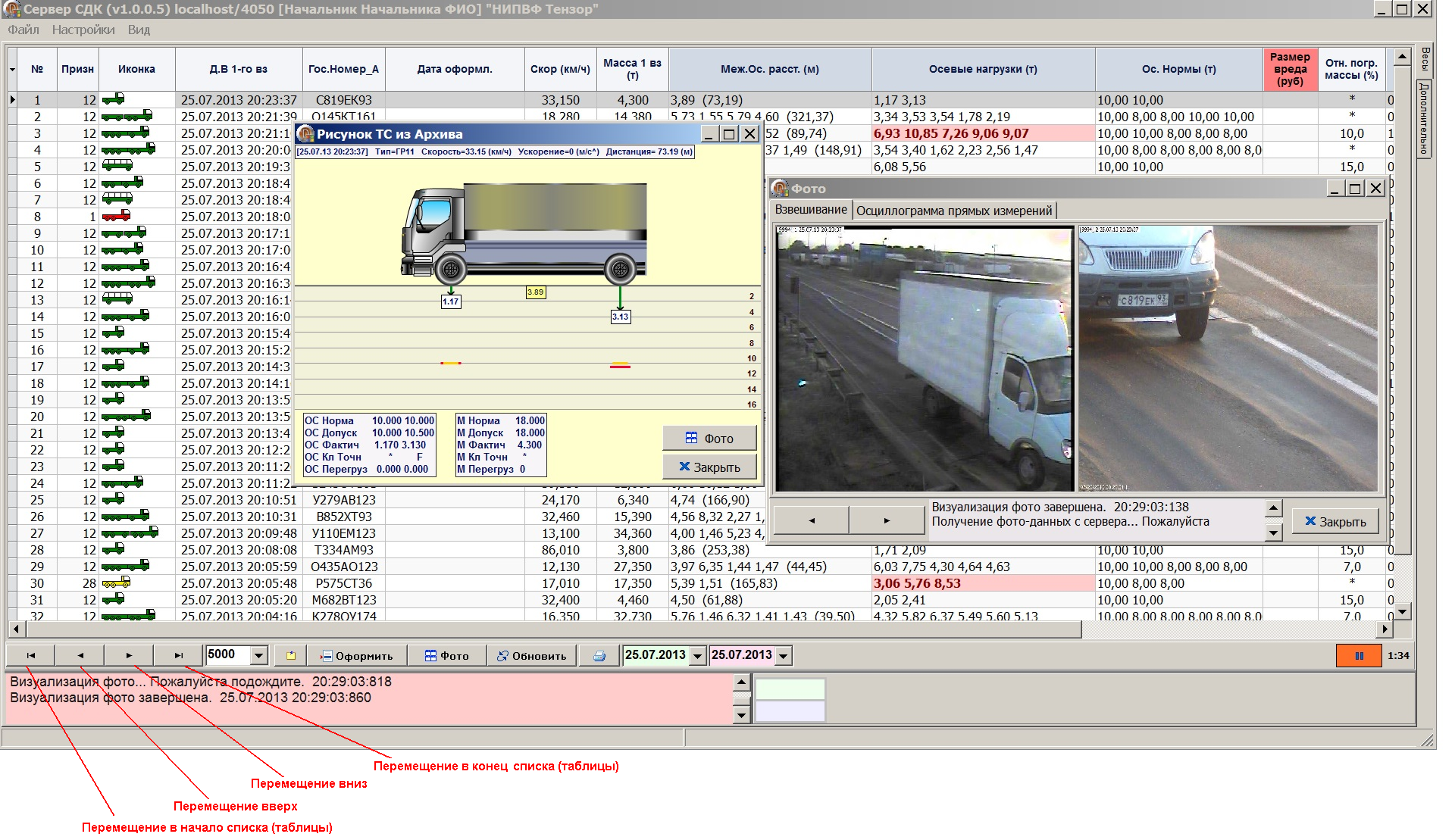
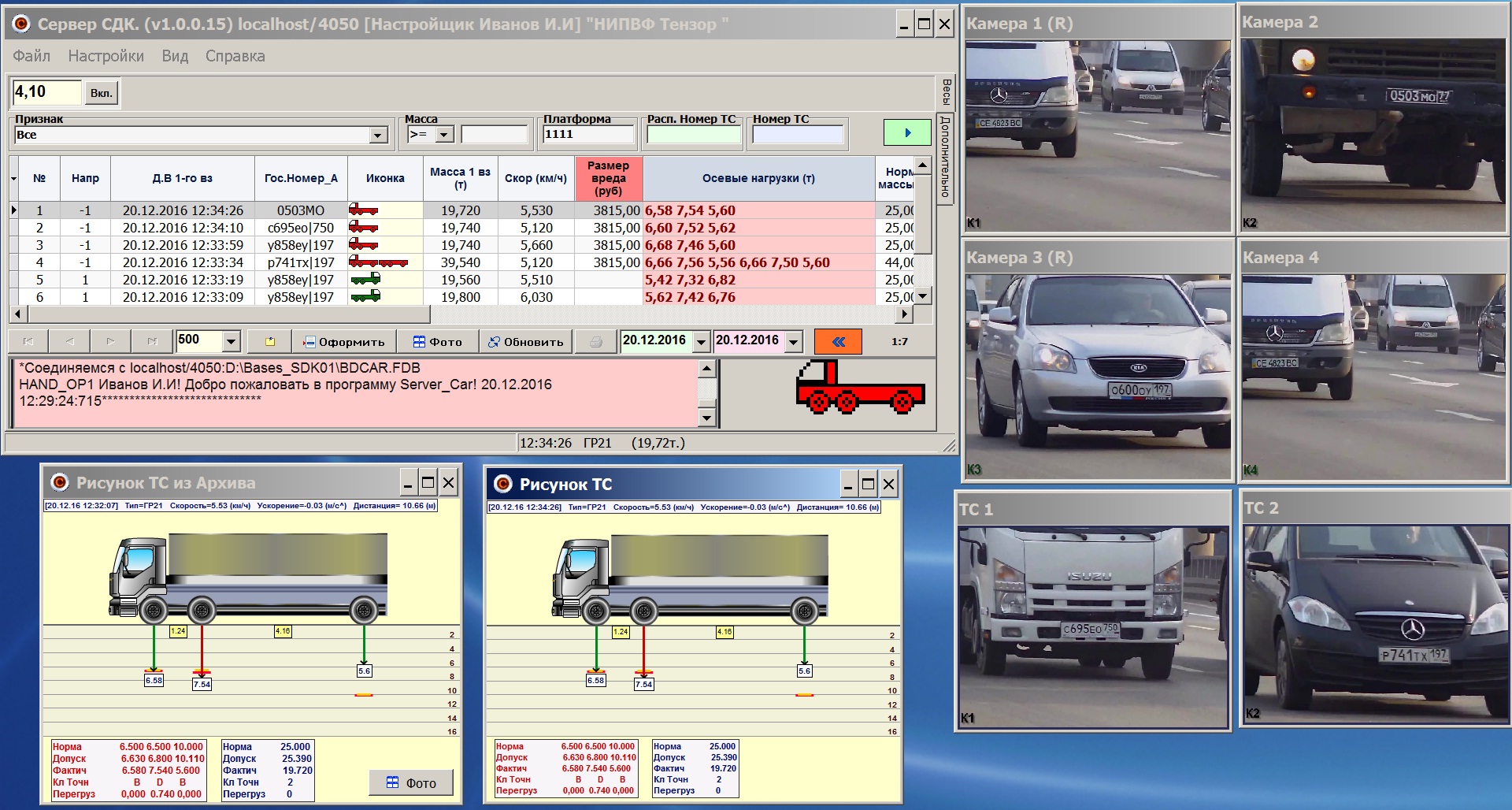
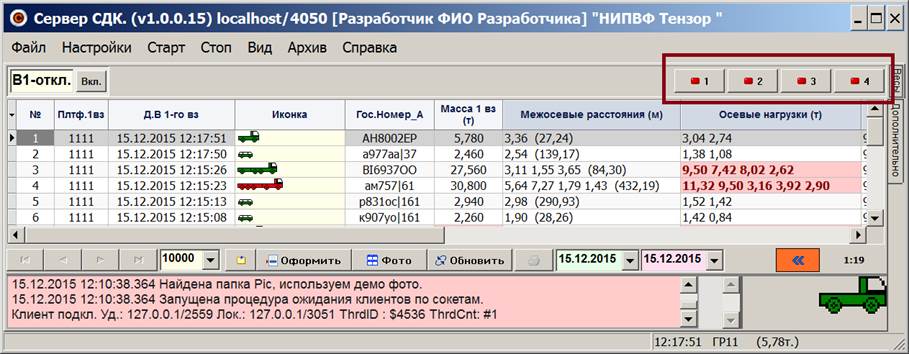
В случае применения программы Server_car для весового контроля на автомобильных дорогах на мониторе появляется приведенное ниже основное окно.
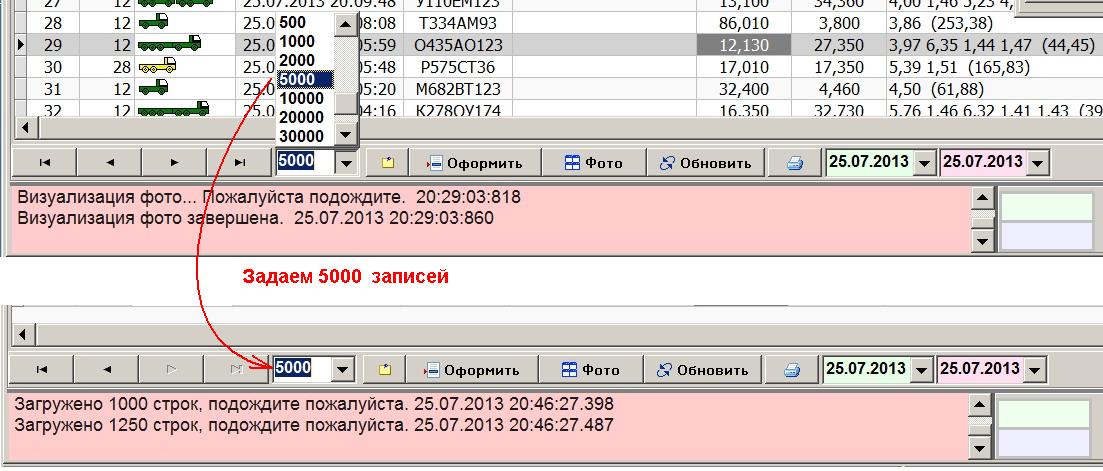
В рабочем режиме все результаты измерений отображаются в таблице пополняемых записей «текущего архива». Кроме результатов измерений в данной таблице отображаются дополнительные сведения, полученные в результате идентификации ТС, если имеются соответствующие средства и в базе данных (БД) есть сведения связанные с идентификатором ТС, а также сведения вносимые оператором при регистрации ТС. «Длина» таблицы и состав выводимых колонок (необходимые для отображения характеристики) руководитель отбирает из полного списка. В этой же форме таблицы можно просматривать записи прошлых дней (архив).
К выходным данным относятся результаты измерений, а также всевозможные информационные сообщения. Список выходных данных - результатов обработки измерительных сигналов, представлен в таблице 1
Таблица 1 - Результаты измерений
|
Сокращенное имя колонки |
Смысловое значение |
|
Основные выходные данные |
|
|
ДВ 1-го взв |
Дата и время взвешивания |
|
Осей |
Количество осей |
|
Масса 1-го взв (т) |
Масса ТС определенная как сумма осевых нагрузок. |
|
Абс. Погр. Массы (т) |
Допускаемые пределы абсолютных погрешностей измерений массы ТС (т) |
|
Отн. Погр. Массы (%) |
Допускаемый предел относительной погрешности измерения массы ТС (% от измеренного значения) |
|
Ос. Нагр. (т) |
Значения осевых нагрузок ТС |
|
Абс. Погр. Ос. Нагр. (т) |
Допускаемые пределы абсолютных погрешностей измерений осевых нагрузок (т) |
|
Отн. Погр. Ос. Нагр. |
Обозначения А, B, C, D, E, F допускаемых пределов относительной погрешности измерения осевых нагрузок, принятые в программе и технической документации на Систему. Обозначениям соответствуют относительные погрешности ±1, ±2, ±3, ±4, ±8, ±16 . |
|
Вспомогательные данные |
|
|
Меж. Ос. Расст.(м) |
Значения межосевых расстояний |
|
Ос. Скорости (км/час) |
Скорости каждой оси ТС |
|
Меж. Ускор. (м/с2) |
Изменение скорости ТС в единицах ускорения определяемое для двух смежных осей |
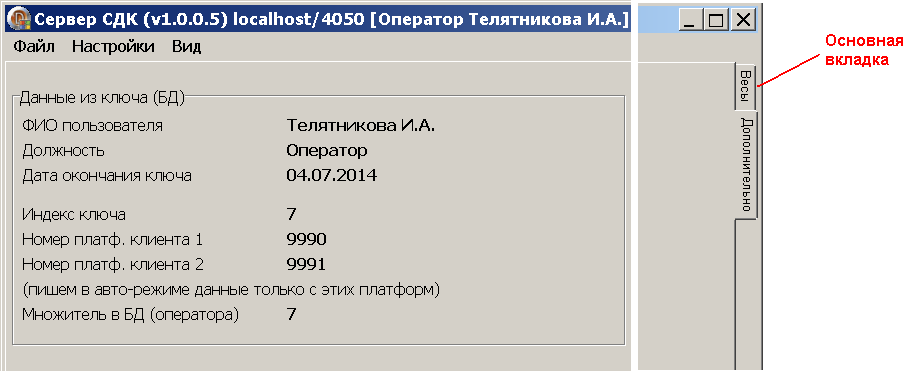
Вид основного окна
Основные элементы интерфейса этого
окна приведены ниже с необходимой
поясняющей информацией.
В заголовке окна написано имя программы «Сервер СДК». В скобках указана версия программы (см. п. 1.1). Текст localhost/4050 означает компьютер в составе локальной сети. В квадратных скобках указывается фамилия оператора.
Ниже заголовка перечислены наименования вкладок меню (кнопок): Файл, Настройки, Вид.
В меню Файл имеется возможность подготавливать справки и реестры. Информация, входящая в справки и реестры, выбирается с помощью условий фильтров в ходе заполнения полей диалогового интерфейса.
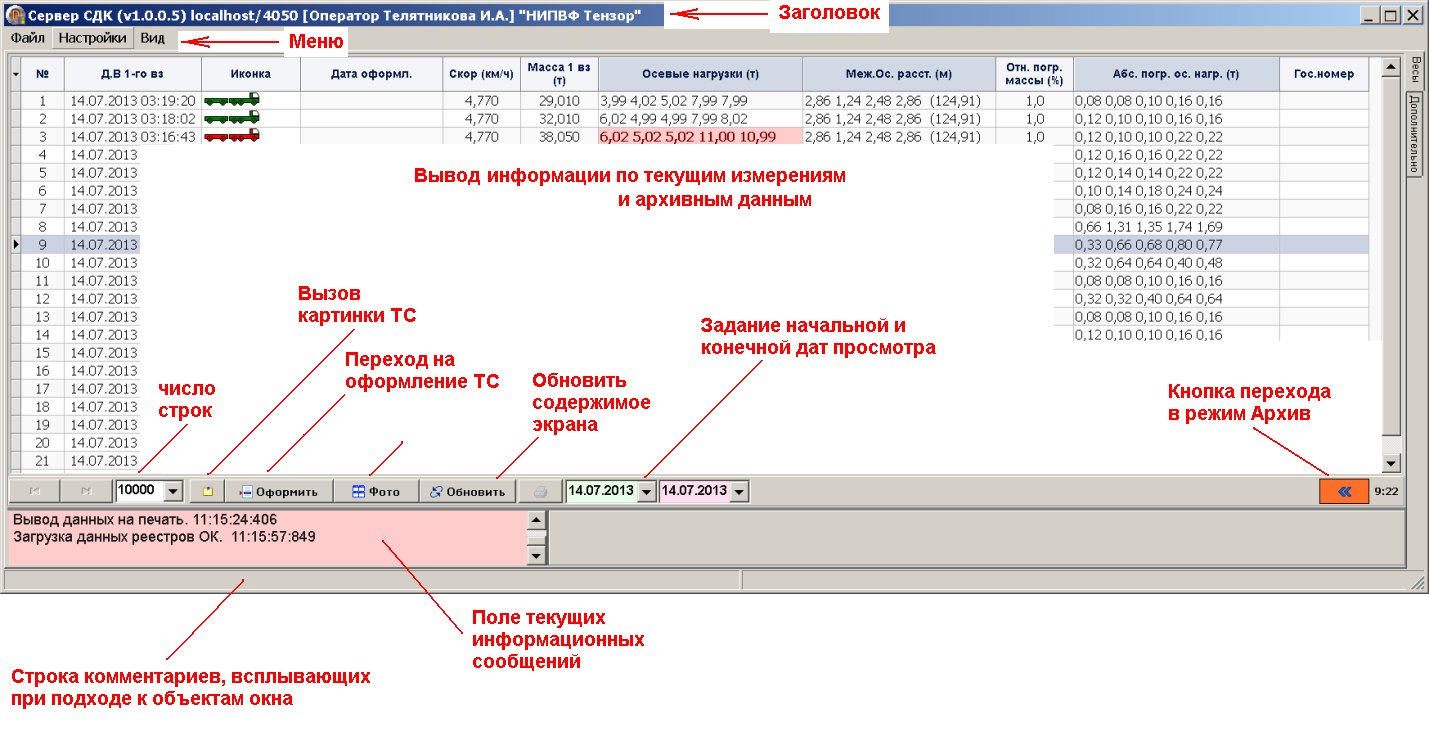
Ниже окна списка параметров ТС находятся кнопки и окно со строками информации о ходе работы. Справа внизу оранжевая кнопка является переключателем режимов:
![]() - отображение текущих данных
в таблицу с информацией о ТС;
- отображение текущих данных
в таблицу с информацией о ТС;
![]() - останов отображения для
возможности просматривать архив (при
этом регистрация ТС продолжается, но
не отображается на экране)
- останов отображения для
возможности просматривать архив (при
этом регистрация ТС продолжается, но
не отображается на экране)


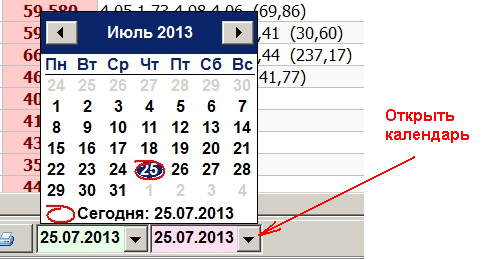
В режиме просмотра архива для выделенного столбца (надо выделить элемент в столбце) можно использовать поиск по первой букве (ввести символ в соответствующее поле) и применять фильтры для отбора информации (ввести интересующее сочетание нескольких символов). Для задания дат начала и конца архива используется ввод с помощью календаря
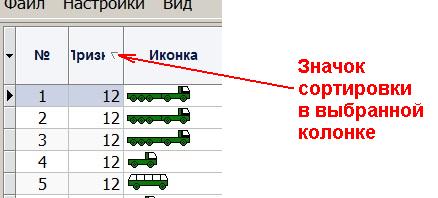
В программе имеется возможность сортировки данных таблицы по убыванию (повторное нажатие по возрастанию). Для этого надо щелкнуть мышью в заголовке таблицы.
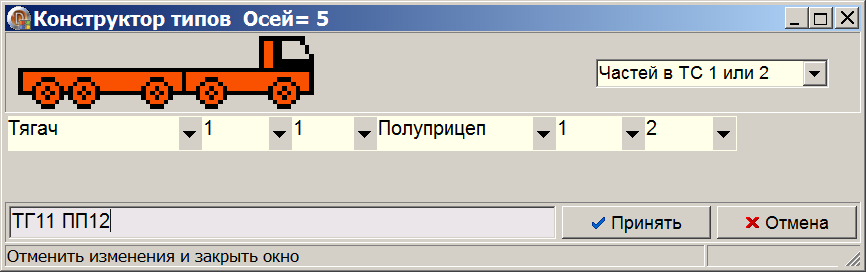
ПО имеет возможность корректировки
типа ТС, в случае, если он неточно
определен автоматически. Тип – это
комбинация символов и цифр, характеризующая
ТС.
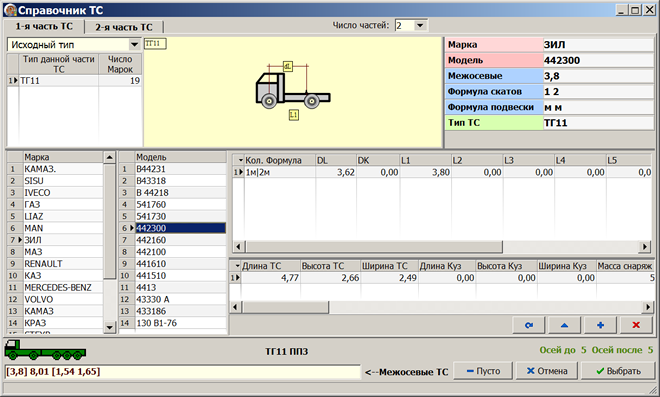
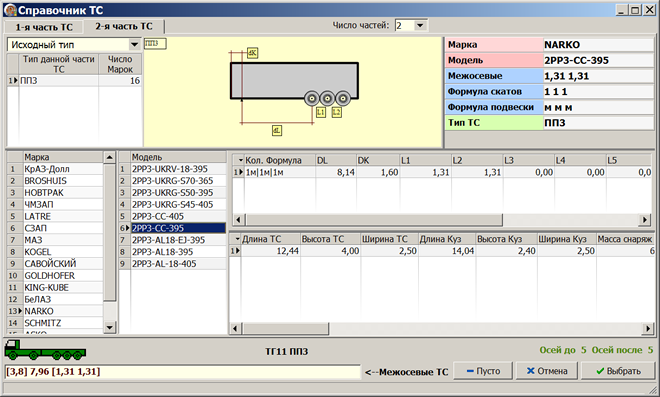
Так же тип можно получить, если выбрать ТС из имеющегося в программе справочника
транспортных средств,
используя марку и модель ТС
Программа поддерживает работу одновременно с четырьмя камерами (две обзорные, две распознающие-для контроля госномеров ТС). Камеры могут быть как аналоговые, так и IP-камеры.
При таком количестве камер можно легко организовать реверсивное движение на любых объектах, см ниже лист изменений п 9.1
При удалённом мониторинге используя безлимитный интернет с высокой скоростью , а так же соответствующих сетевых настройках (порт-форвардинг в роутере), можно вести on-line наблюдение за потоком из любого места.
Используя интернет через USB модемы можно достаточно комфортно просматривать фото-изображения и осциллограммы проезда:
3.5 Основные настройки программы перед работой
В меню Настройки для назначения требуемой функции необходимо установить «птичку» в строке с наименованием функции (делается щелчок левой кнопкой мыши). Меню Настройки содержит включение-выключение видеонаблюдения, автозапуск необходимых Клиентов, настройки видеокамер.
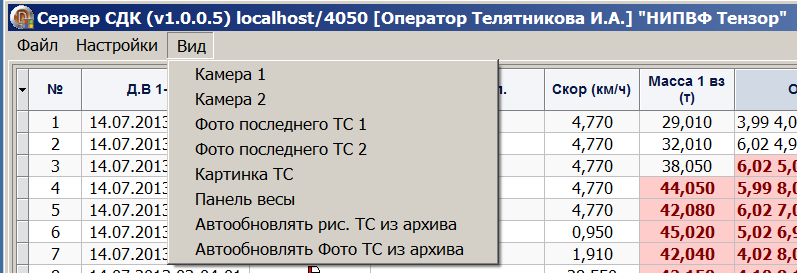
Меню Вид позволяет устанавливать отображения на экране:
- текущее изображение с видеокамер,
- фото последнего ТС в соответствующем Клиенте (по номеру Клиента),
- картинку указанного ТС,
- окно с показаниями веса на соответствующем Клиенте (поле Весы),
- автоматически обновлять картинку и фото ТС из архива.
Установки в меню Настройки производятся руководителем и запоминаются при выходе из программы. Оператор только контролирует текущие установки. Автозапуск клиента или сервера (если установлена «птичка») означает их автоматический запуск при включении или перезагрузке компьютера.
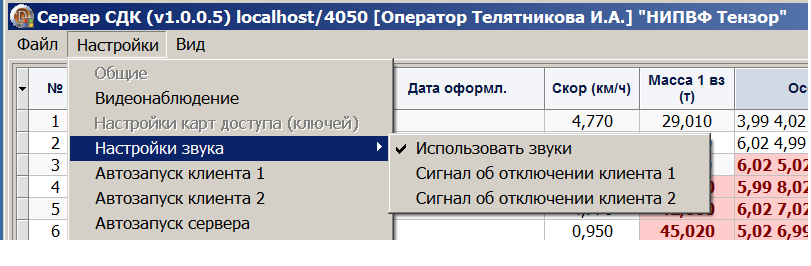
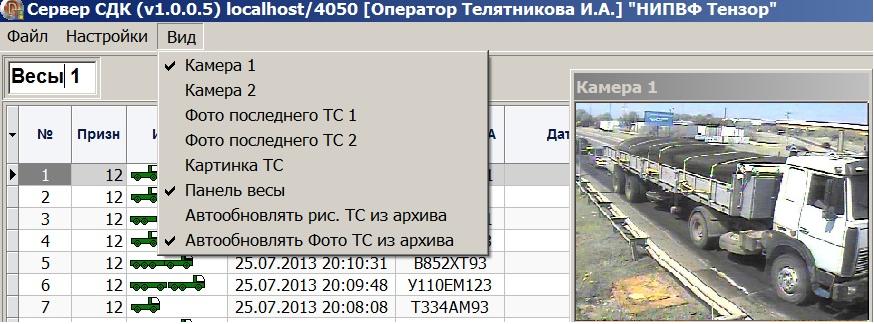
Активизация функции Видеонаблюдение позволяет фиксировать фото проходящих через весы ТС в архиве, а при включении дополнительно опций Камера 1 и (или) Камера 2 в меню Вид позволяет отображать ТС, непрерывно проезжающие через весы. Соответственно в меню Вид можно установить отображение последнего фото 1 или 2 и картинки ТС, поступающих с весов. В отличие от этого, два последних пункта меню («автообновление» рисунка или фото из архива) предназначены для случая получения сервером порций данных через локальную сеть или Интернет, и тогда отображается фото или картинка последнего ТС в текущей порции.
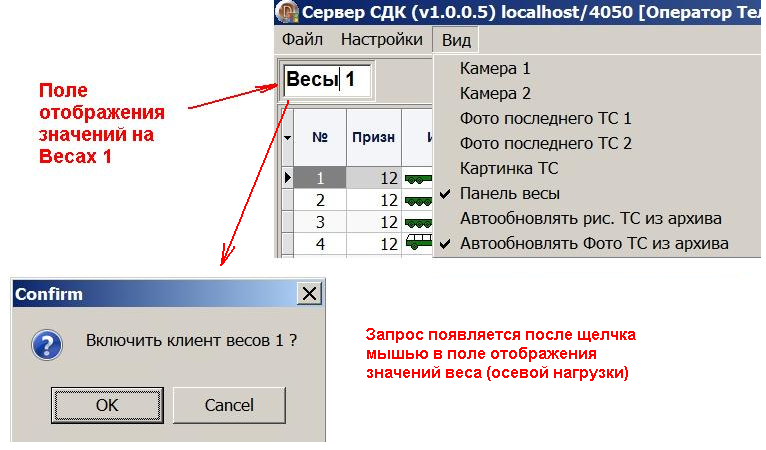
Боковая вкладка Весы является основной,
а вкладка Дополнительно содержит
сведения об операторе, ключе данного
комплекта СДК и номера платформ Клиентов.
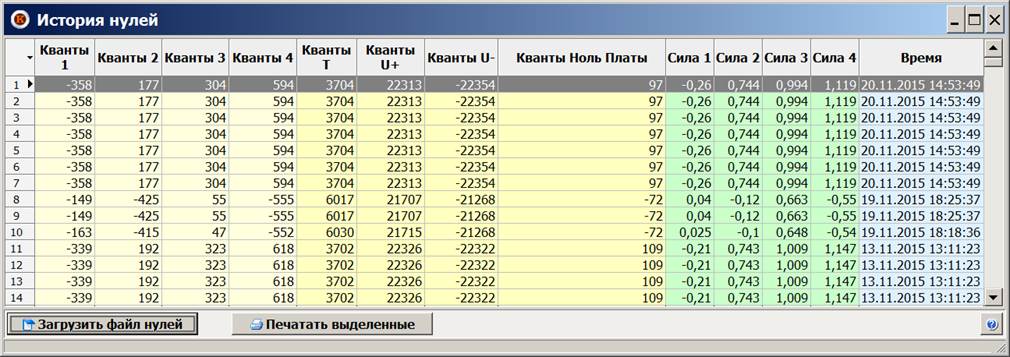
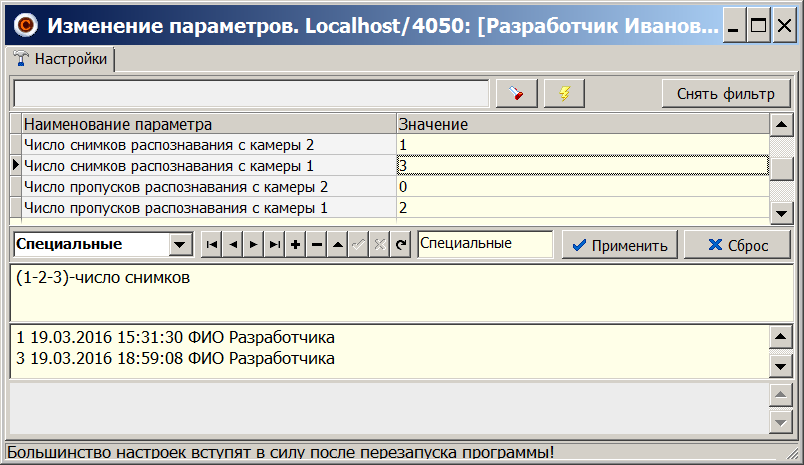
Для важных настроек существует история изменений данной строки, с информацией: значение до исправления, кто и когда вносил эти изменения.
4 Выполнение программы и сообщения оператору
4.1 Загрузка и запуск программы
4.1.1 Действия с техническими средствами
Перед включением компьютера необходимо убедиться, что тумблер включения блока питания ГПУ находится в выключенном состоянии.
Включение Системы производят в следующем порядке:
- включают источник бесперебойного питания и после сигнала готовности ИБП к работе включают ПК,
- после полной загрузки операционной системы включают блок питания ГПУ,
- запускают программное обеспечение Системы и проверяют работоспособность Системы.
Подробные указания по работе с Системой, изложены в документе «Руководство по эксплуатации. СДК.Ам-000-000 РЭ».
К работе можно приступать после прогрева оборудования в течение 30 мин.
При работе необходимо следить за
информационными сообщениями ПО и за
сигнальными индикаторами на БП и на
периферийных устройствах ПК.
4.1.2 Порядок запуска программы
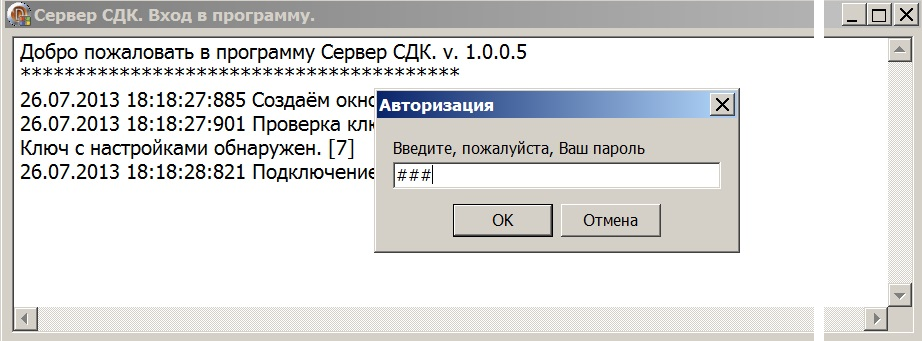
При запуске программы Server_car запрашивается пароль.
В конфигурации Системы с одним или двумя ГПУ Server_car осуществляет:
- включение программы Klient_car для каждого экземпляра весов, прием данных и управляющих сигналов с каждого активного «клиента»,
- прием видеосигнала с двух камер видеонаблюдения,
- «захват» изображений ТС в момент наезда первой оси ТС на ГПУ по управляющему сигналу программы Klient_car,
- запись данных, полученных с «клиента» и изображений ТС в базу данных.
Автономно программа Server_car позволяет подключаться к базе данных Системы для просмотра результатов измерений и сопутствующих данных о ТС, а также для ввода дополнительной информации.
Автоматический запуск ПО производится через «Автозагрузку». Возможен запуск Server_car с ярлыка, который может быть выведен на рабочий стол компьютера.
При запуске программа всегда проходит через инициализацию, и далее на фоне текущих сообщений о выполнении процедур программы появляется окно пароля оператора.
Процесс определения весовых параметров
ТС обеспечивает программа Klient_car.
При запуске программы Klient_car проверяется наличие электронного ключа программы подключаемого к порту USB. Каждому комплекту СДК.Ам соответствует уникальный заводской номер, который заносится в ключ при монтаже весов и передаётся ответственному лицу заказчика и записывается в паспорт весов.
Программное обеспечение реализует диалоговый интерфейс в виде главного меню, вкладок и окон, появляющихся в ходе диалога пользователя с программой. Пользователь имеет весьма ограниченный набор команд (входных данных) в рамках запрограммированного интерфейса. Процедуры измерений максимально автоматизированы. Сервер автоматически отслеживает установленную связь между сервером и клиентом и если она нарушается, то информирует пользователя об этом диагностическими сообщениями. Также ведётся подробный журнал (лог) работы системы.
Оператор должен поддерживать активный режим работы системы, при котором осуществляются измерения и регистрация ТС. Система ведет протокол работы СДК.Ам, отмечая время активного режима фиксации ТС. Запуск других программ вместе с ПО Системы не допускается.
Для того, чтобы наполнялось
окно со строками измерительной информации
(отображение текущих данных в окне
списка параметров ТС) надо, чтобы
оранжевая кнопка внизу справа имела
вид:
![]()

Для
работы с архивом и оформлением надо
использовать останов отображения
![]() (при этом регистрация ТС продолжается,
но не отображается на экране).
(при этом регистрация ТС продолжается,
но не отображается на экране).

Текущий архив программы, содержит все
основные результаты измерений.
4.2.1
Общая характеристика входной информации
Часть входной информации поступает от измерительных устройств в программу автоматически, вторая часть поступает автоматически из файлов данных, третья часть вводится оператором с помощью мыши и клавиатуры.
Интерфейс пользователя характеризуется тем, что действия оператора сведены к минимуму. Способ организации команд интерфейса пользователя сводится к запуску действий по реализации процедур автоматического взвешивания. В число вводимых параметров ТС входят только число осей и межосевые расстояния при измерениях с остановкой.
В основных полях предусмотрена защита от ввода некорректных значений с предупреждающими сообщениями.
4.2.2 Общая характеристика выходной информации
Передача данных от МЗ части ПО в МНЗ часть и запись в БД осуществляется с проверкой целостности передаваемых данных. Все записи МЗ данных зашифрованы, и имеют свою контрольную сумму, которая может быть проверена для каждой записи и в случае нарушения целостности преднамеренного или непреднамеренного, программа обнаружит несовпадение контрольной суммы, и будет закрыта с предупреждением.
Результаты измерений, переданные программой Klient_car по защищённому интерфейсу программе Server_car, сохраняются в БД и не могут быть изменены. Хранение результатов измерений, осуществлено в защищённой БД, с фиксированием контрольной суммы для каждой записи, с обязательной её последующей проверкой по доступу.
Если сбой появляется в ходе текущих измерений, то оператор должен повторить операцию. Сбой в текущих измерениях не влияет на сохраненные данные.
Характер, организация и предварительная подготовка входных данных, а также выходные данные определяются в соответствии с нижеследующим описанием общего процесса работы ПО при проведении измерений.
К выходным данным кроме результатов измерений, также относятся всевозможные информационные сообщения.
Алгоритм обработки данных обеспечивает
два основных режима измерений
(взвешивания):
автоматическое взвешивание в движении ТС, проезжающих по ГПУ,
взвешивание с остановкой каждой оси на ГПУ.
Измерения в движении включаются автоматически при запуске программы, если установлена соответствующая функция программы. Задание режима работы осуществляет руководитель при настройке программы.
При отсутствии нагрузок на ГПУ программа ожидает появление ТС, а при наезде первой оси ТС генерирует управляющий сигнал для программы Server_car. Во время движения ТС через ГПУ происходит непрерывное измерение осевых нагрузок, а также определение межосевых расстояний и скорости каждой оси ТС. Нагрузки на ГПУ от каждой оси ТС измеряются в единицах массы. Масса ТС рассчитывается как сумма осевых нагрузок. Средняя скорость проезда ТС вычисляется с учетом скорости проезда каждой оси ТС.
В промежутках между наездами ТС, алгоритм ведёт непрерывное слежение за “нулём” ГПУ. Медленные изменения показаний датчиков, связанные, например, с загрязнением поверхности грузоприёмного устройства или температурным дрейфом измерительной аппаратуры, автоматически компенсируются алгоритмом путём добавления к измерениям компенсирующей добавки.
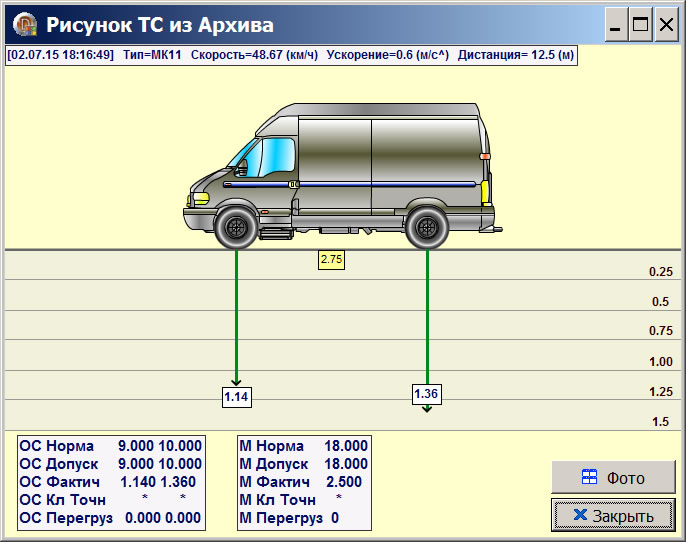
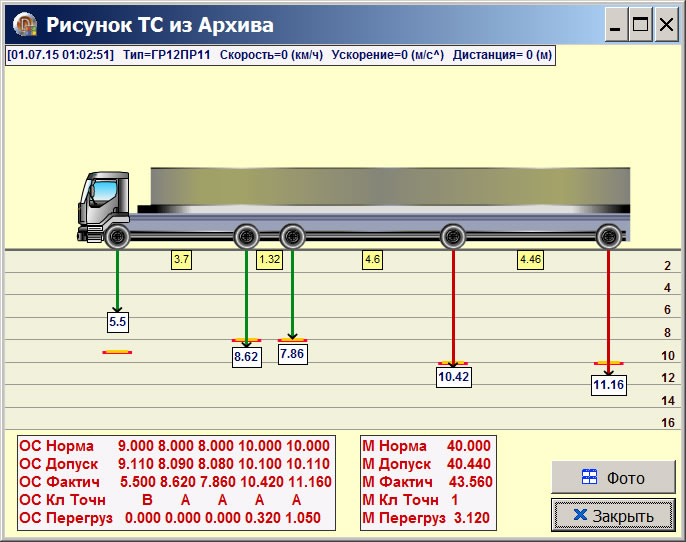
После определения программой проезда ТС на экране в таблице появляются результаты измерений и сопутствующие данные: дата, время, скорость, значения осевых нагрузок и массы ТС, относительные и абсолютные пределы допускаемой погрешности измерений, расстояния между смежными осями, условное изображение (картинка) ТС, содержащее весовые характеристики ТС и допустимые нормы.
На экране компьютера могут отображаться буквенные обозначение качества проезда каждой оси ТС, автоматически определяемые программой для фиксируемого ТС. Обозначениям качества проезда при измерении сил воздействия ТС на дорожное покрытие или полной массы соответствуют определенные пределы допускаемых относительных погрешностей измерений.
Как правило, основной причиной погрешности измерений является неудовлетворительное состояние дорожного покрытия, прилегающего к ГУ. Это приводит к повышению динамических составляющих сигналов, связанных с «раскачкой» ТС.
Малая погрешность измерений может быть принципиально недостижима при измерениях в движении для отдельных ТС (неисправных ТС, а также частично заполненных цистерн), даже если прочие условия - качество дорожного покрытия и равномерность проезда, удовлетворительные. В этих случаях рекомендуется контрольное взвешивание в режиме измерений с остановкой оси на ГПУ.
Измерения с остановкой включаются по команде оператора, при этом измерения в движении прекращаются. Измерение значений массы и осевых нагрузок ТС производят последовательно устанавливая каждую ось ТС по центру грузоприемной площадки ГПУ. При выполнении измерений, тормоза ТС должны быть отпущены, трансмиссия выключена. Для предотвращения перемещения ТС во время измерений допускается использовать противооткатные приспособления.
Перед началом измерений вводят информацию о количестве осей и расстояниях между смежными осями ТС. При необходимости обнуляют показания ГПУ путём нажатия на соответствующую кнопку. Возможны три режима измерений: автоматический, полуавтоматический и ручной. Основной режим полуавтоматический, который позволяет начать измерения каждой оси ТС только после команды оператора. Взвешивание оси осуществляется автоматически с учетом стабилизации показаний нагрузки оси на ГПУ (в покое). После измерения последней оси ТС вычисляется масса ТС. Если результаты измерений признаются приемлемыми, то по команде оператора результаты измерений сохраняют в БД.
Автоматический режим реализует возможность измерить осевые нагрузки и массу ТС без участия оператора в процессе измерений. Взвешивание оси осуществляется автоматически с учетом стабилизации показаний нагрузки оси на ГПУ (в покое). После съезда оси с ГПУ и наезда следующей оси ТС программа автоматически приступает к измерениям очередной оси. После измерения последней оси ТС вычисляется масса ТС. Если результаты измерений признаются приемлемыми, то по команде оператора результаты измерений сохраняют в БД.
При сохранении в БД результатов измерений ТС в поле «скорость» заносится нулевая скорость, а в качестве расстояний между смежными осями значения, введенные оператором перед началом измерений. Расстояния должны быть определены оператором с использованием рулетки или на основании паспортных технических данных ТС.
В ручном режиме инициализируется кнопка “Фиксация нагрузки” и оператор, нажимая на нее, фиксирует текущую нагрузку на ГПУ. Данный режим применяется для измерений статических нагрузок на ГПУ при нагружении платформы гирями в процессе проведения метрологической поверки.
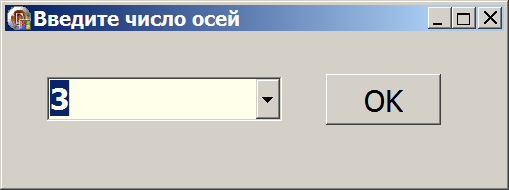
Процедура Измерения с остановкой обеспечивает измерение каждой оси ТС на грузоприемном устройстве. При проведении взвешивания неподвижного ТС надо пройти следующие шаги диалога:
Задание числа осей ТС
Выбор автоматического режима означает,
что ТС оператор только контролирует
процесс проезда ТС по весам при взвешивании
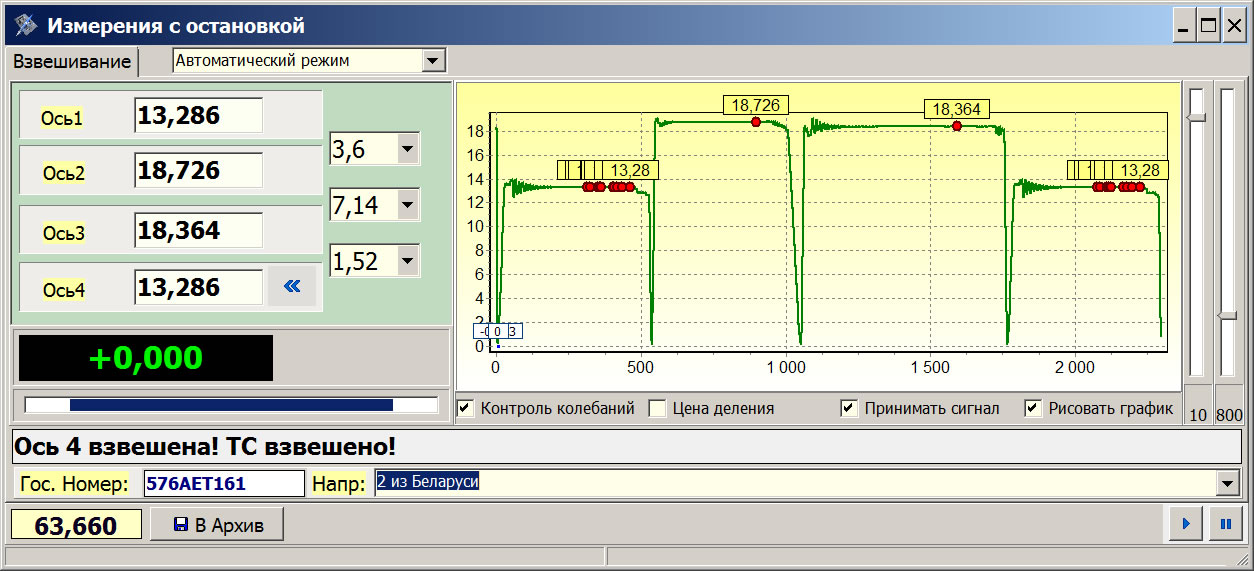
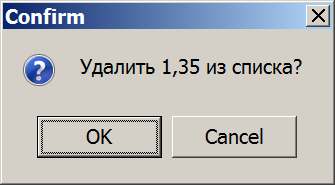
После получения осевых нагрузок надо задать межосевые расстояния (в пополняемом списке приведены все типовые значения). Этот список можно редактировать путем удаления ненужных величин.
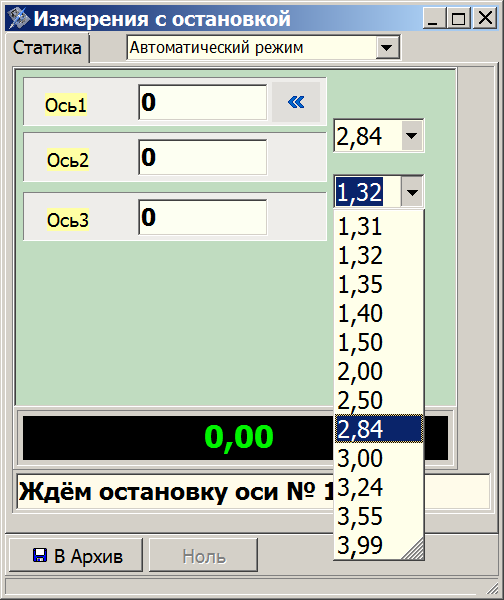
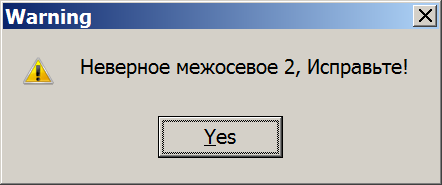
Если одно из значений межосевых не задано (или задано некорректно), выводится предупреждение с номером оси
Результаты измерений принимаются по команде оператора и передаются в программу Server_car и заносятся в БД (архив) автоматически.
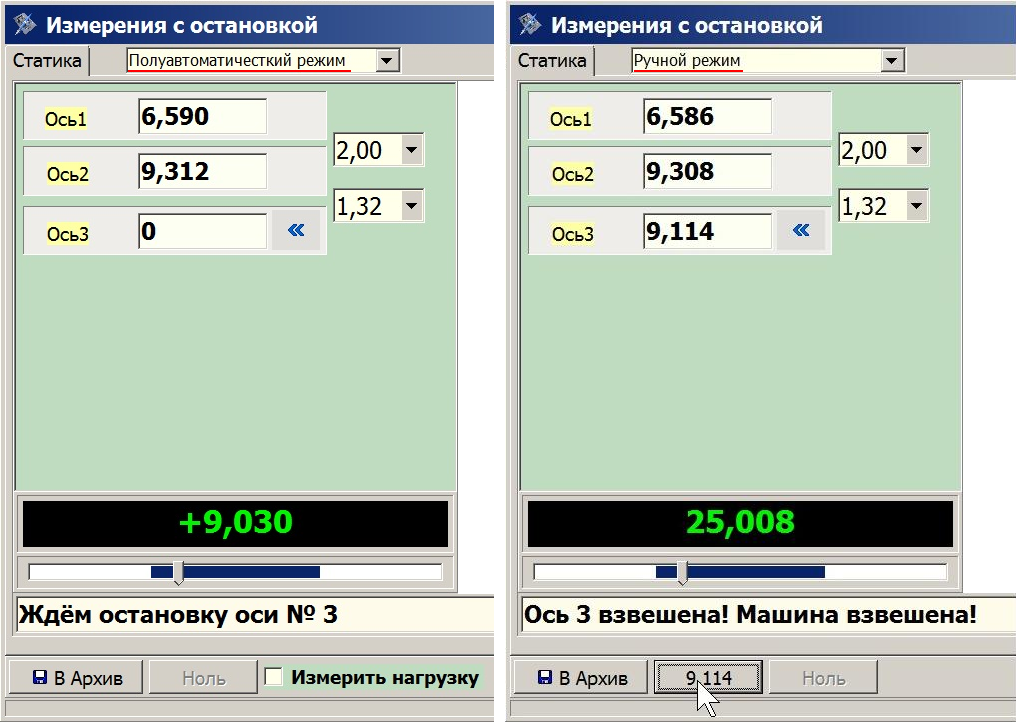
При нажатии кнопки В архив
характеристики измеренного ТС появляются
в основом архиве. Признак статических
измерений – скорость равная нулю.
В ПО Системы реализована также сервисная процедура Диагностика, которая обеспечивает вывод на экран измерительных данных датчиков и служит для контроля измерительной аппаратуры. Процедура Диагностика запускается из главного меню программы.
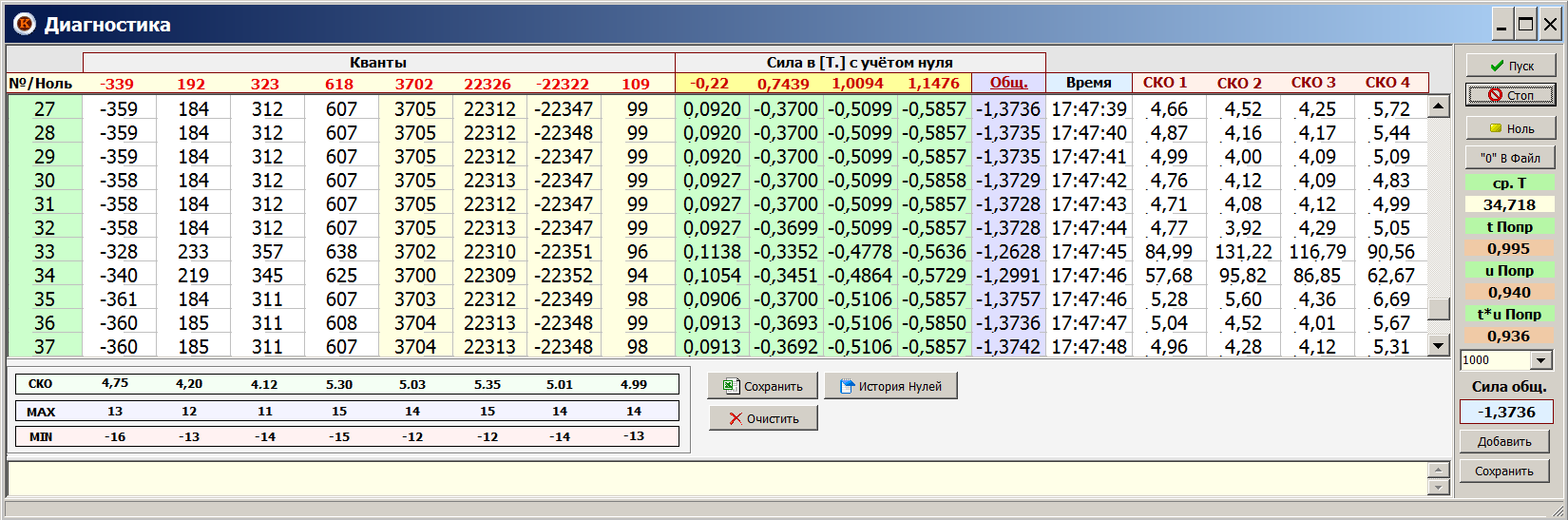
В режиме Диагностика осуществляется визуализация данных, поступающих с каждого датчика ГПУ. Смысл параметров диагностических измерений объясняется в «Руководстве по эксплуатации».
4.2.6 Подготовка текущих документов
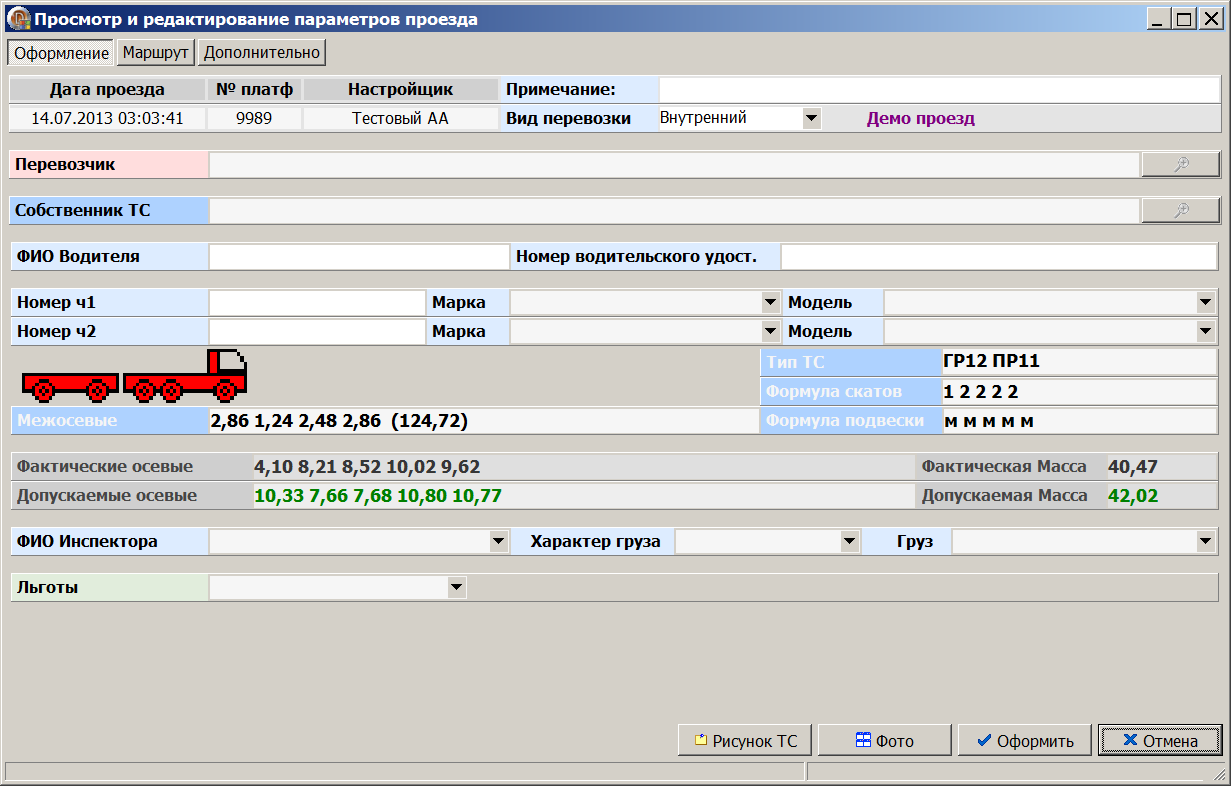
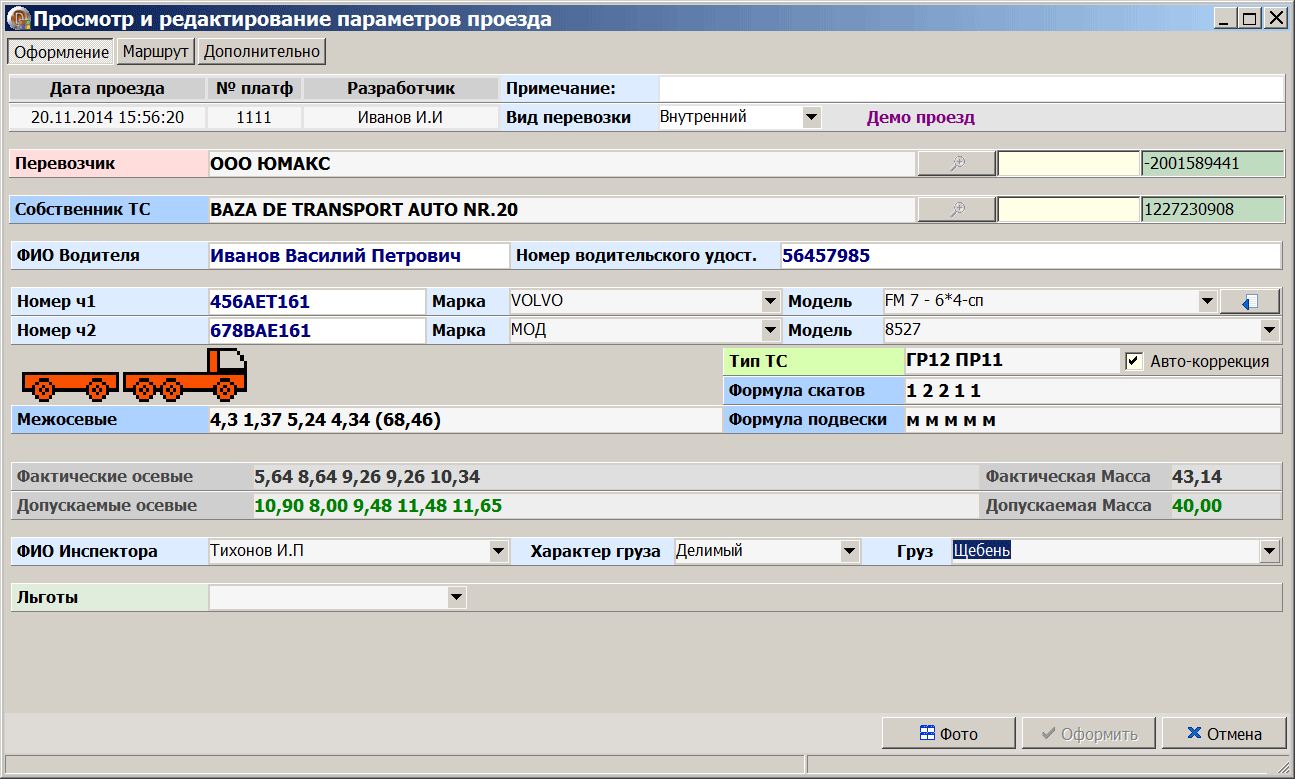
Программа фиксирует весовые параметры ТС, погрешность измерений, скорость и расстояния между осями, определяет тип ТС и автоматически заносит эти данные в базу данных (архив). Оператор проводит регистрацию ТС и оформляет разные документы и итоговые справки.
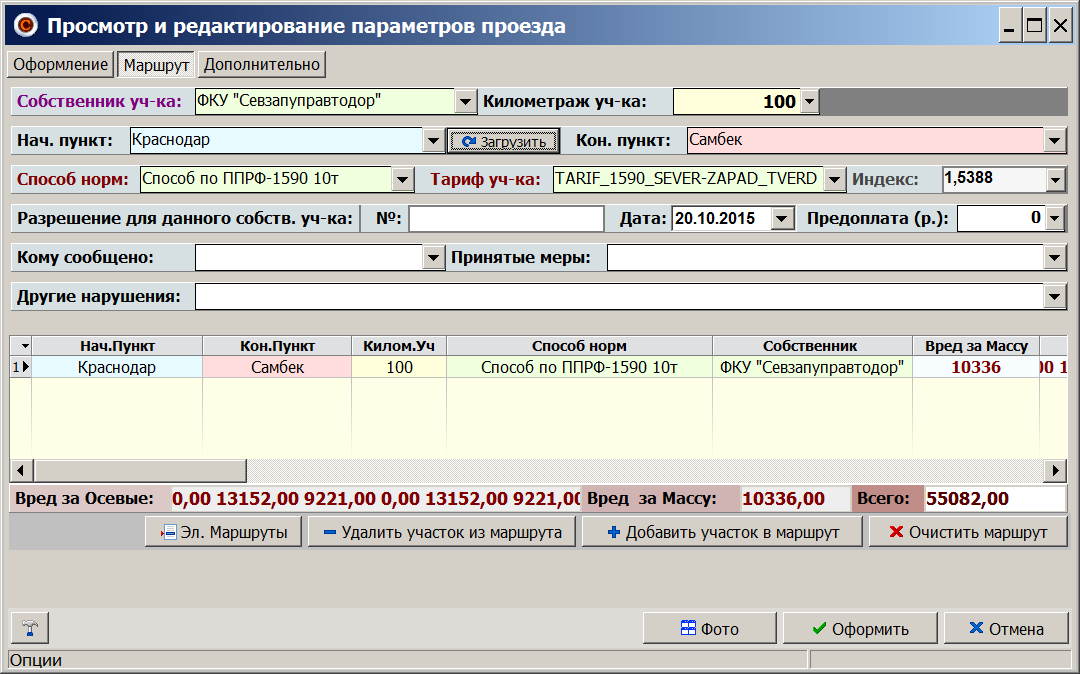
Окно оформления имеет поля для заполнения (выделены белым цветом). Информация, заполняемая автоматически, не редактируется. При заполнении полей есть возможность использовать тексты (строки) набранные ранее (они будут автоматически сохраняться в списке соответствующего поля). ТС может иметь две составные части (ч1 и ч2), каждая из которых имеет свои марки и номера.
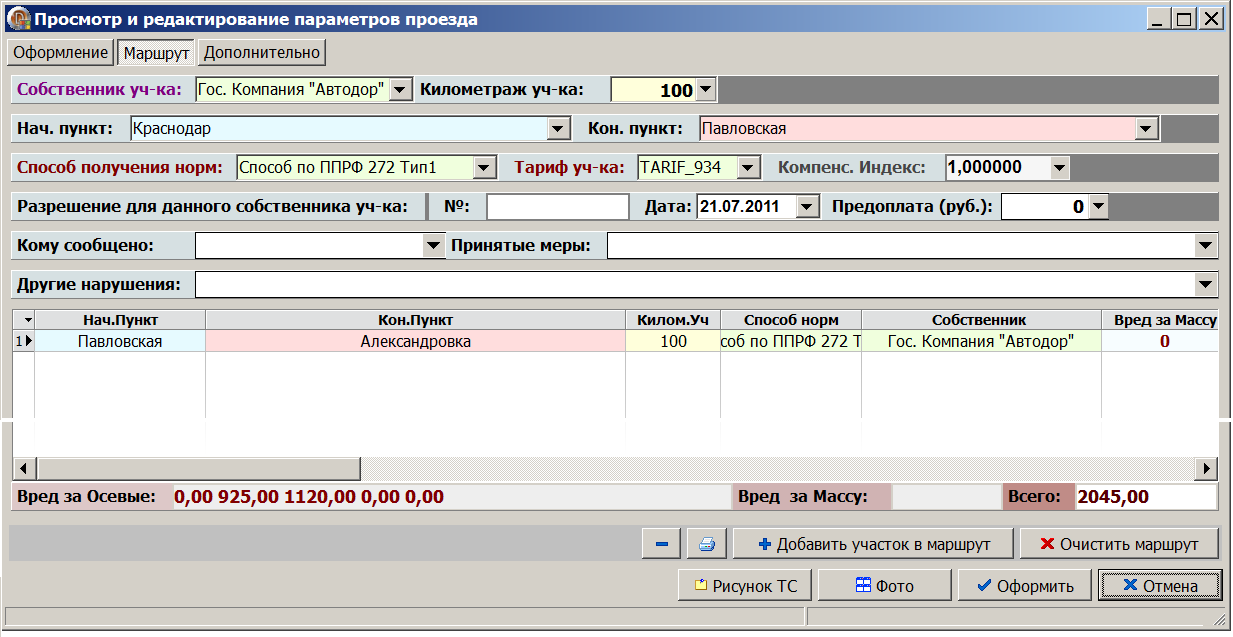
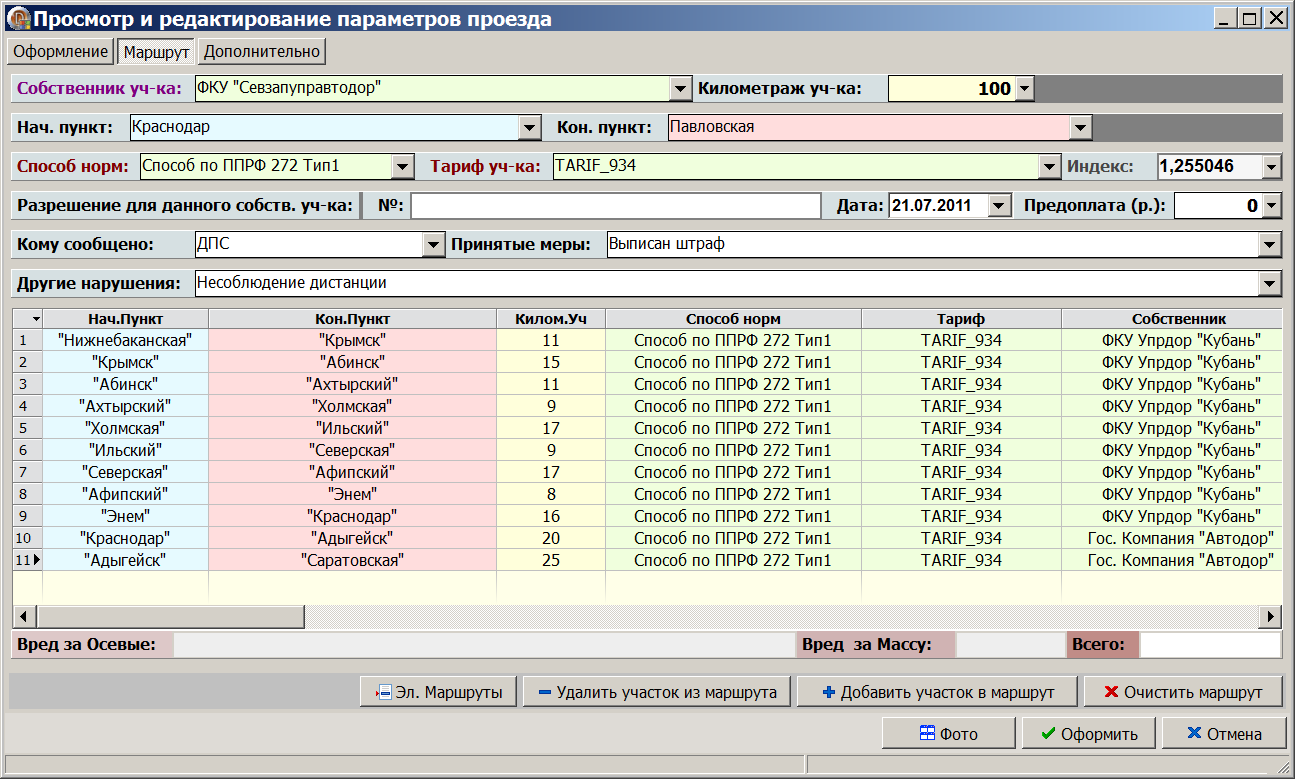
Порядок заполнения полей в основном произвольный за исключением, того, что расчет оплаты вреда возможен после выбора маршрута движения:
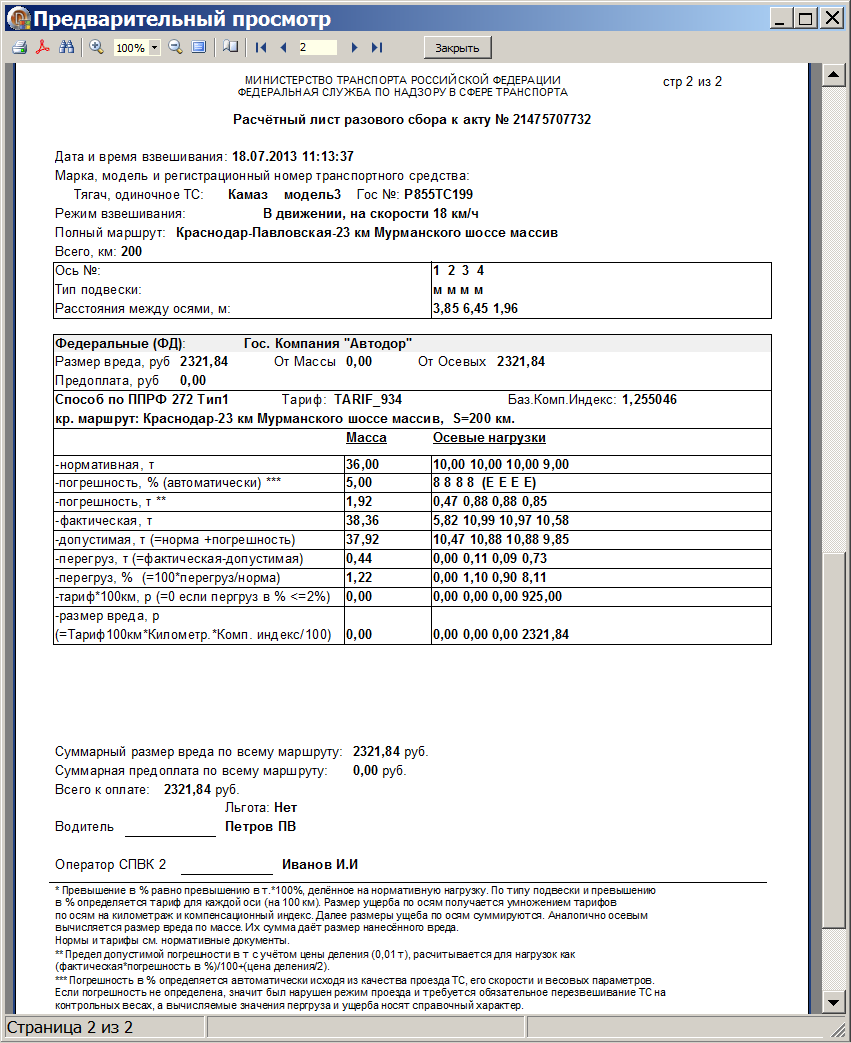
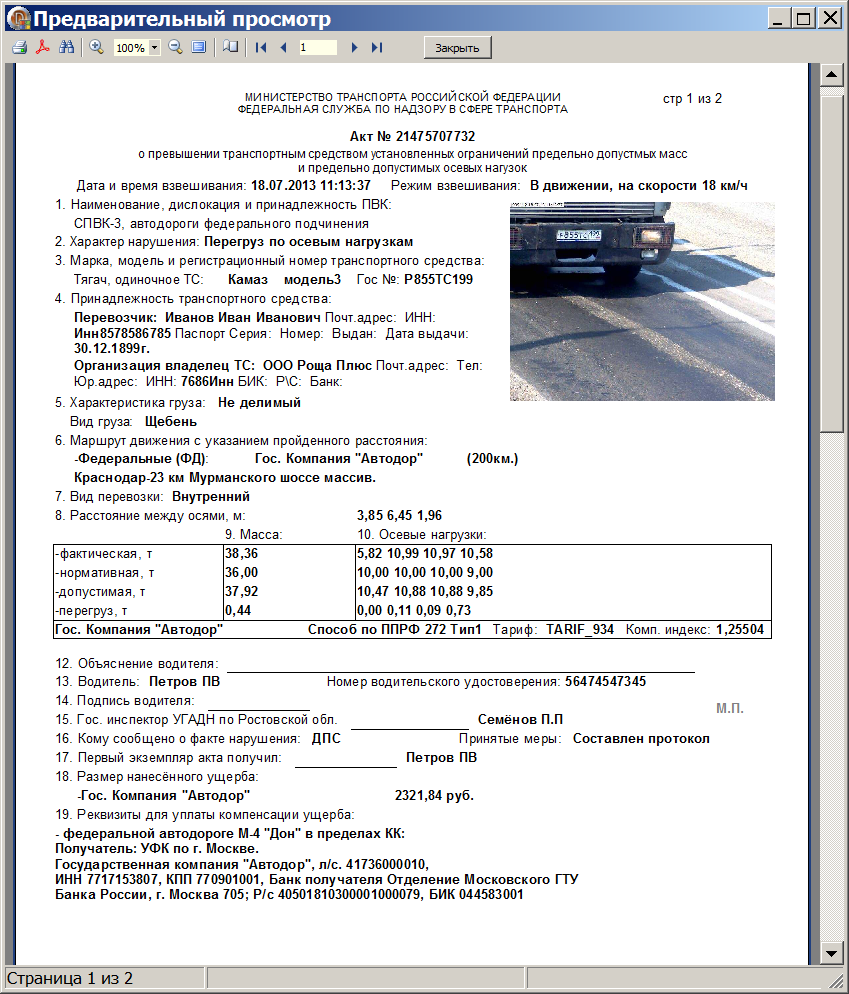
После нажатия кнопки Оформить в основном окне можно распечатать документ. При этом имеется предварительный просмотр. До нажатия кнопки печать (значок принтера в окне предварительного просмотра) имеется возможность редакции документа. После нажатия этой кнопки редакция невозможна (печать кнопка недоступна).
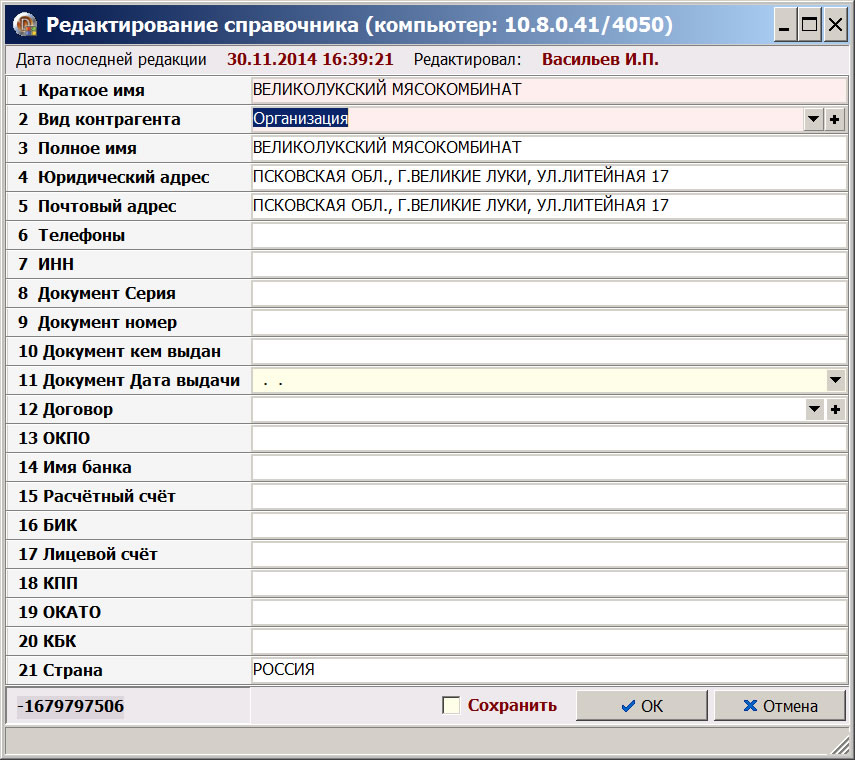
Контрагента перевозчика и собственника выбираем из справочника, который физически может находится как на локальном компьютере, так и на любом компьютере в сети.
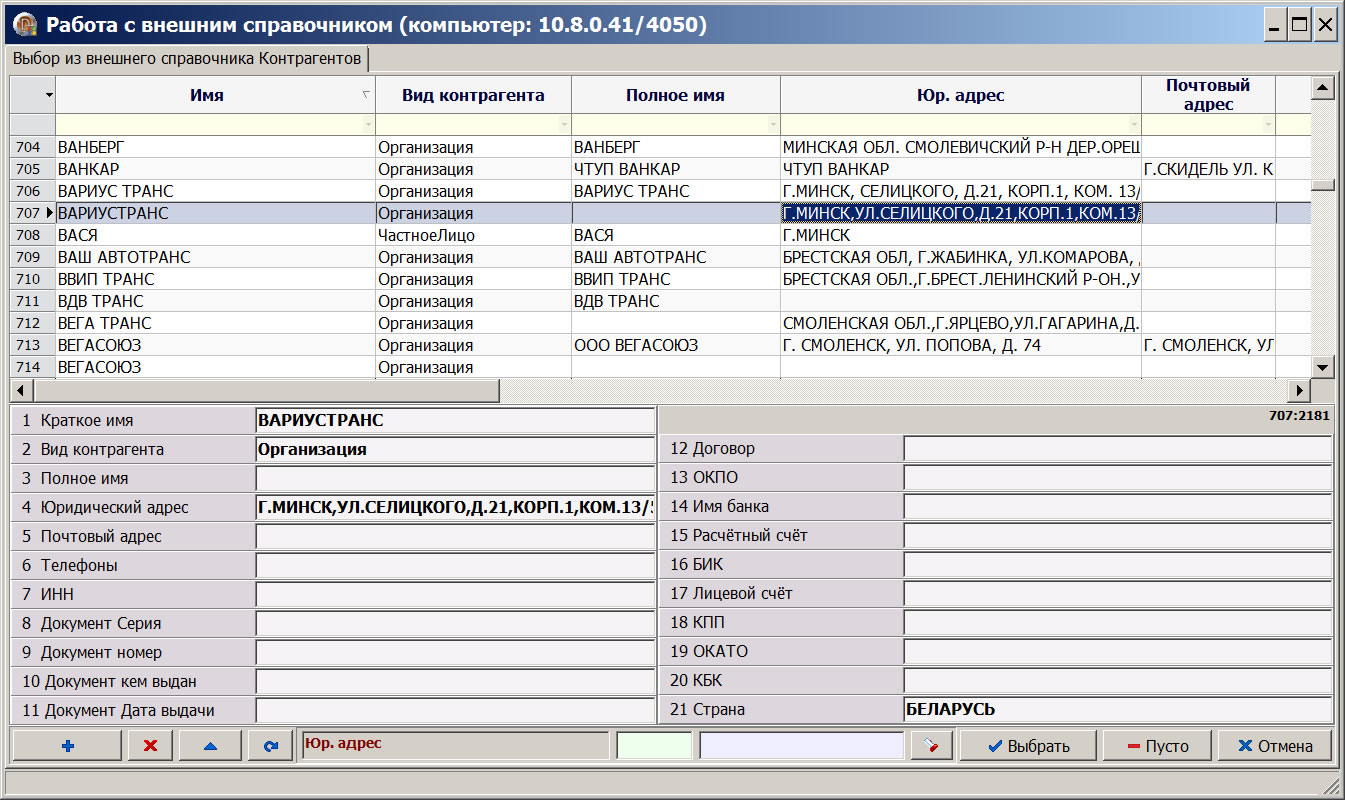
При отсутствии такового в списке (нарушает в первый раз), добавляем его в справочник, устанавливая птичку Сохранить, если птичку не поставить, данные пойдут в акт, но в справочнике не сохранятся. Желательно сохранять реквизиты контрагентов, т.к. в этом случае другие рабочие места, в том числе и на других постах, подключённые к БД данного справочника смогут видеть данного контрагента.
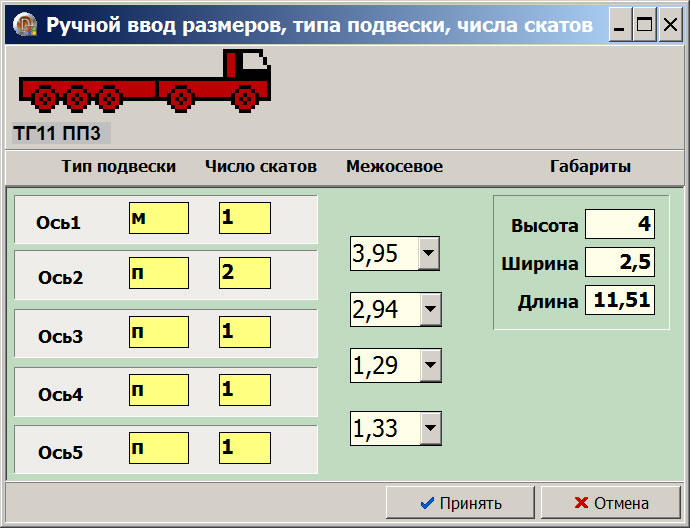
При необходимости корректируются межосевые расстояния, тип подвески и габариты ТС.
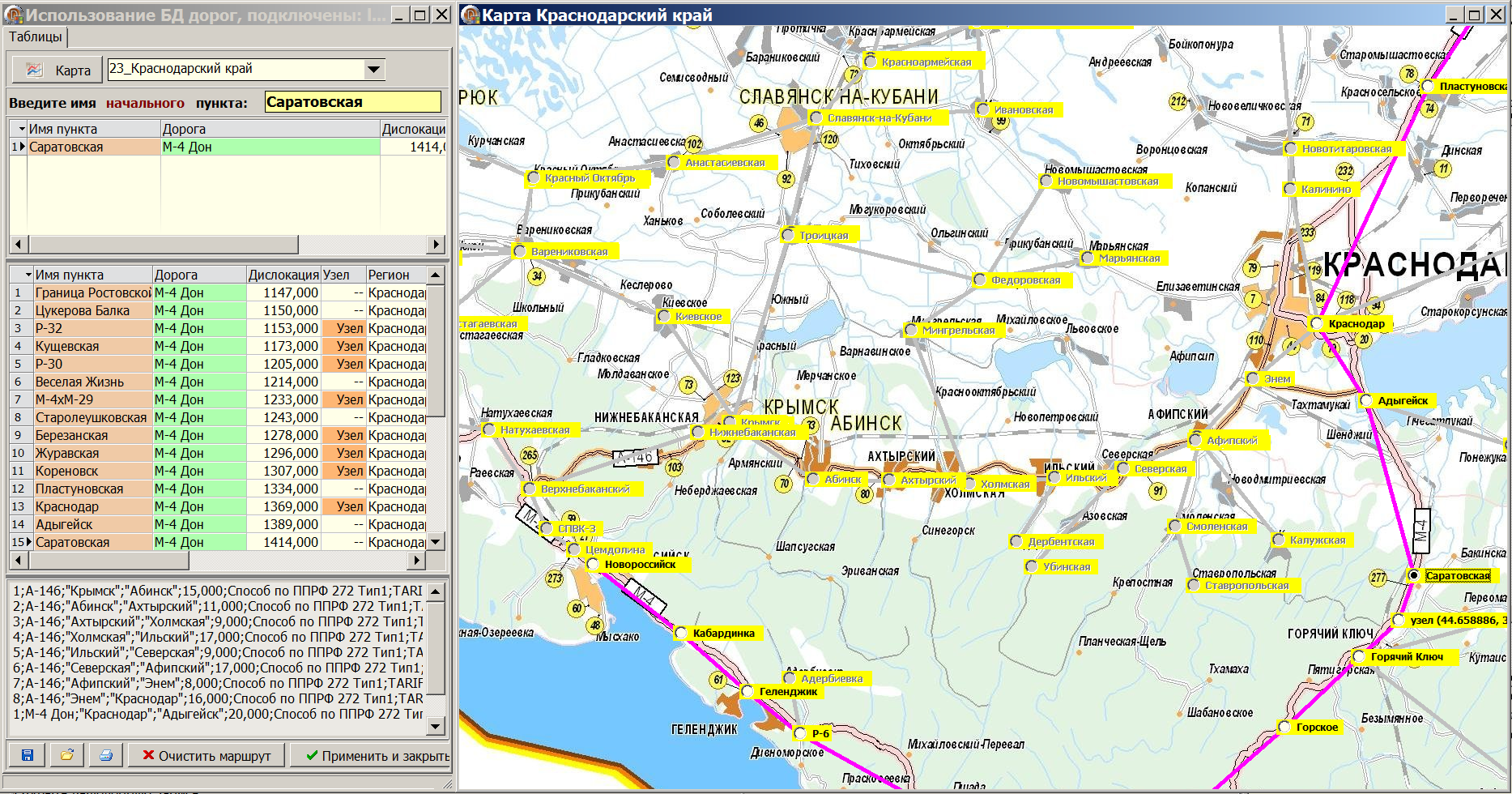
Маршрут задается последовательным заданием километража (от начального до конечного пункта) и наименований населенных пунктов (начального и конечного). Межосевые расстояния надо корректировать до задания маршрута. Редакция текущего документа становится невозможной после печати.
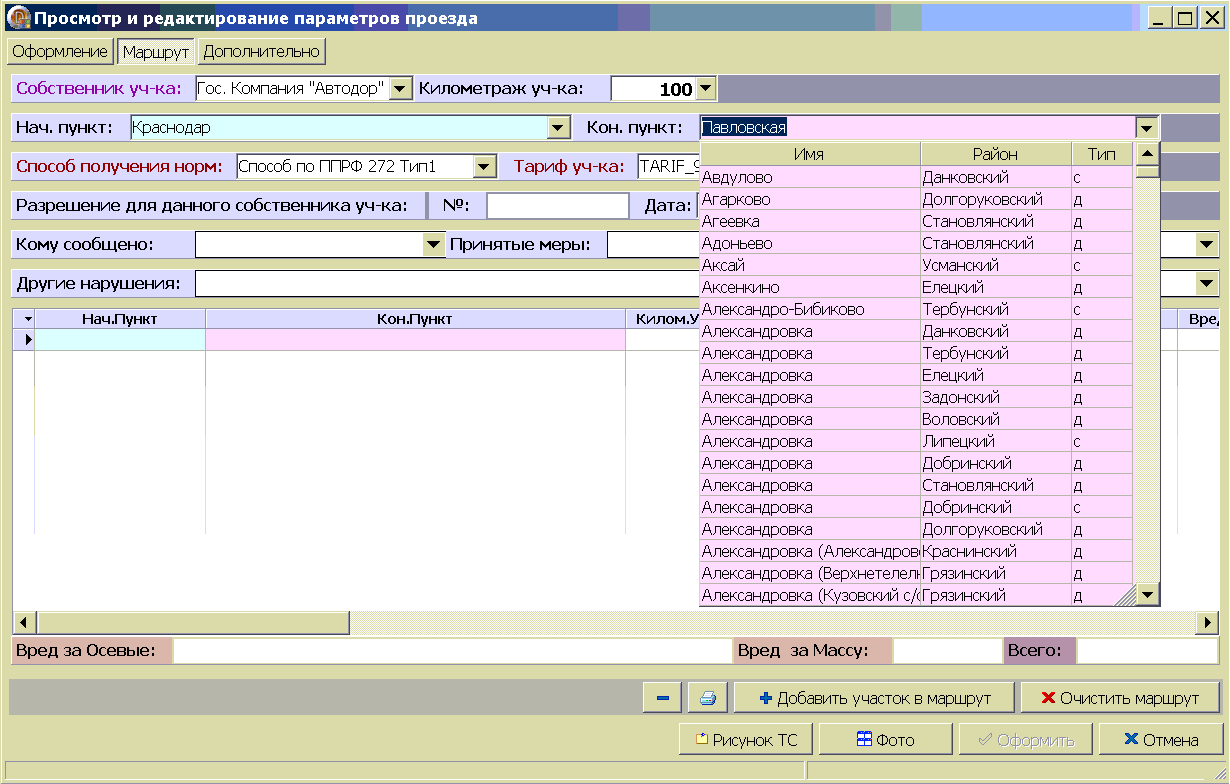
Тип населенного пункта
сокращен до одной буквы: д - деревня, с
– село, п – поселок, х – хутор, с-ца -
станица, г - город
Так же маршрут можно проложить по имеющимся картам-схемам (подготавливаются по открытым данным и данным, предоставляемым заказчиком)
Раздел (вкладка) Дополнительно показывает характеристики ТС до их изменения, а так же температуру на датчиках в момент проезда ТС, имя оператора который оформил данное ТС.
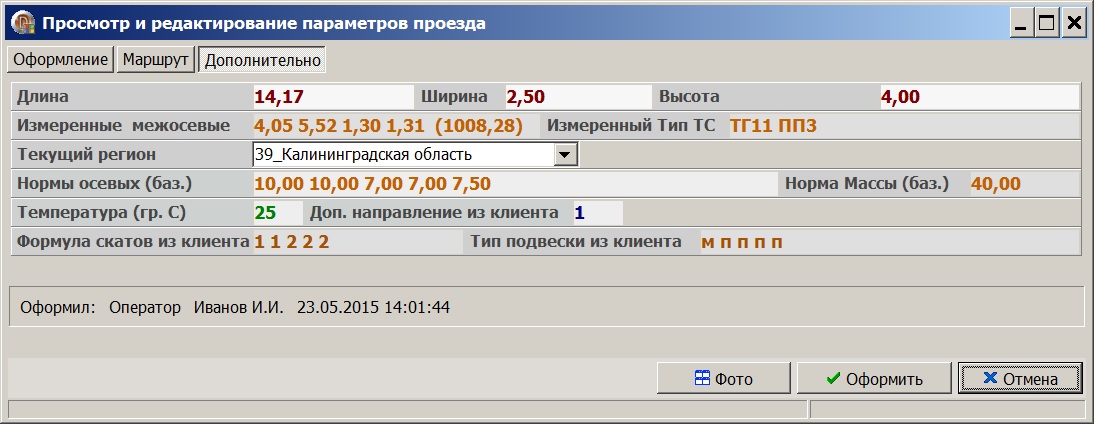
Рисунок ТС – это вспомогательное стилизованное изображение ТС, содержащее основную измерительную информацию.
После отправки на принтер (не важно физический или виртуальный), запись в БД текущей машины будет закрыта для редактирования и данные сразу попадут в статистику за текущий день (см. ниже Справки), поэтому в справке число оформленных и число напечатанных по акту, будет различаться. Также после контрольного взвешивания и оформления ТС иногда перестаёт быть перегруженным, тогда акт не печатают. До отправки на принтер возможно дооформлять машину, делать предварительные просмотры без ограничений. Поэтому в справке итоговые суммы вреда за период берутся только с напечатанных актов, т.к такие данные уже не смогут быть изменены.
4.2.7 Подготовка итоговых отчетных
документов
Итоговые документы могут быть получены как с локального, так и с любого компьютера в сети или в интернете, для этого необходимо иметь соответствующее подключение к необходимой базе данных. При действующей системе передачи данных, итоговые документы могут быть получены с сервера или серверов, куда передаются эти данные.
В меню Файл имеется возможность подготовить справки и реестры. Информация, входящая в справки-реестры может отбираться с помощью фильтров
Справки это сводные отчёты.
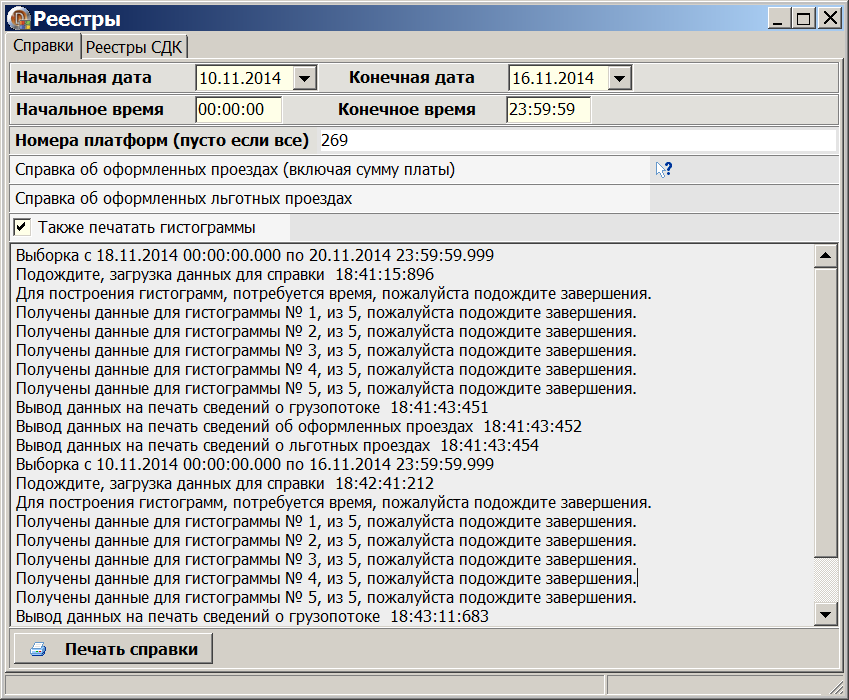
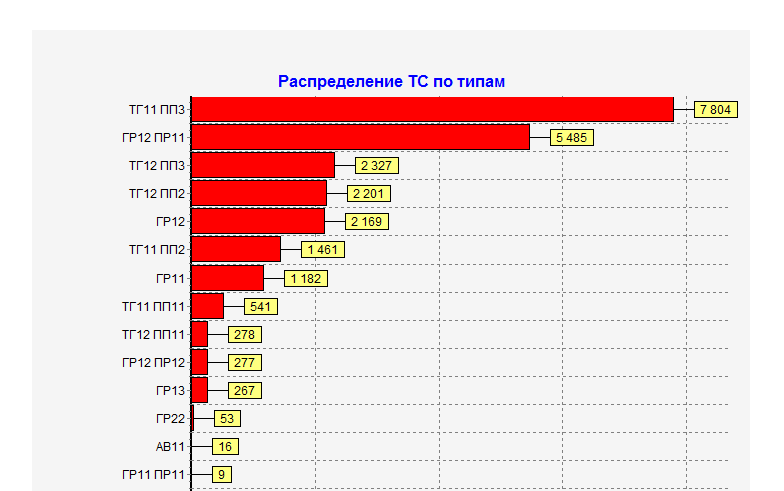
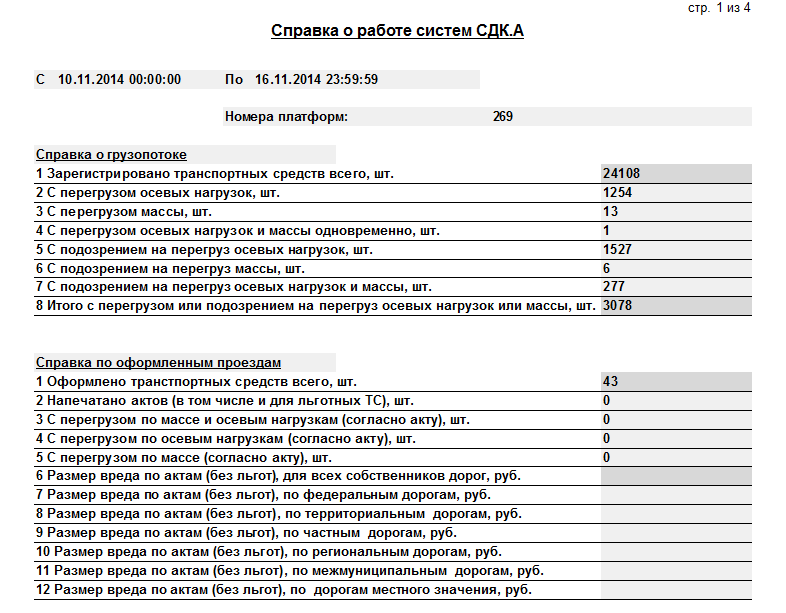
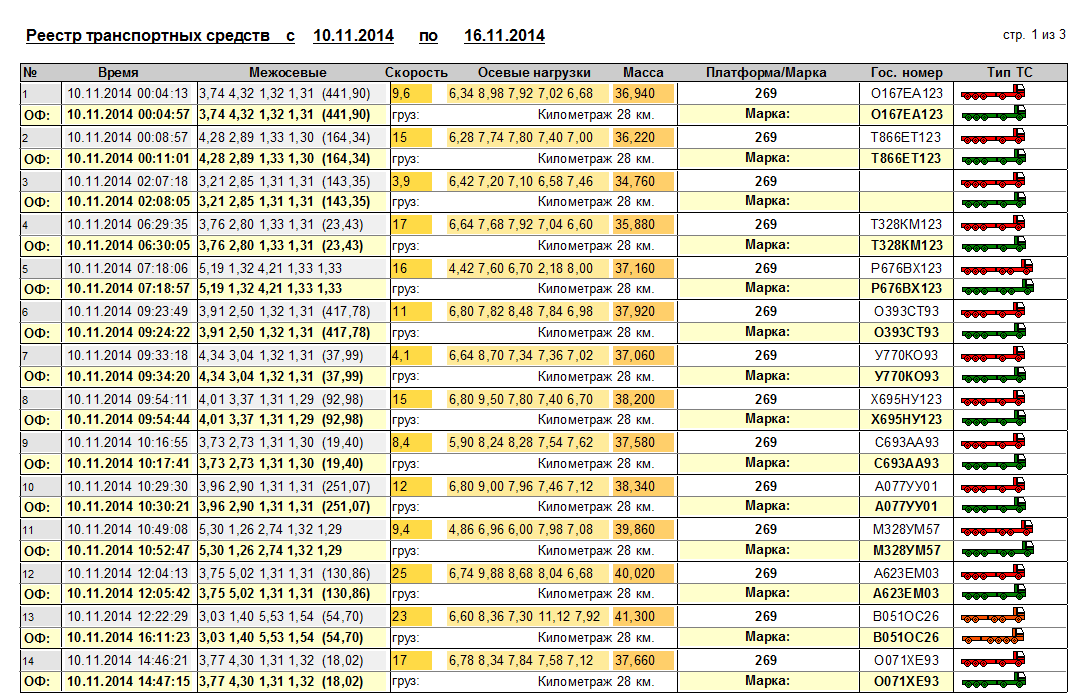
Возможно получение различного рода реестров и выборок с заданными критериями отбора, как проехавших, так и оформленных ТС. Реестры имеют более сложную структуру в сравнении со справками (см. пример ниже)
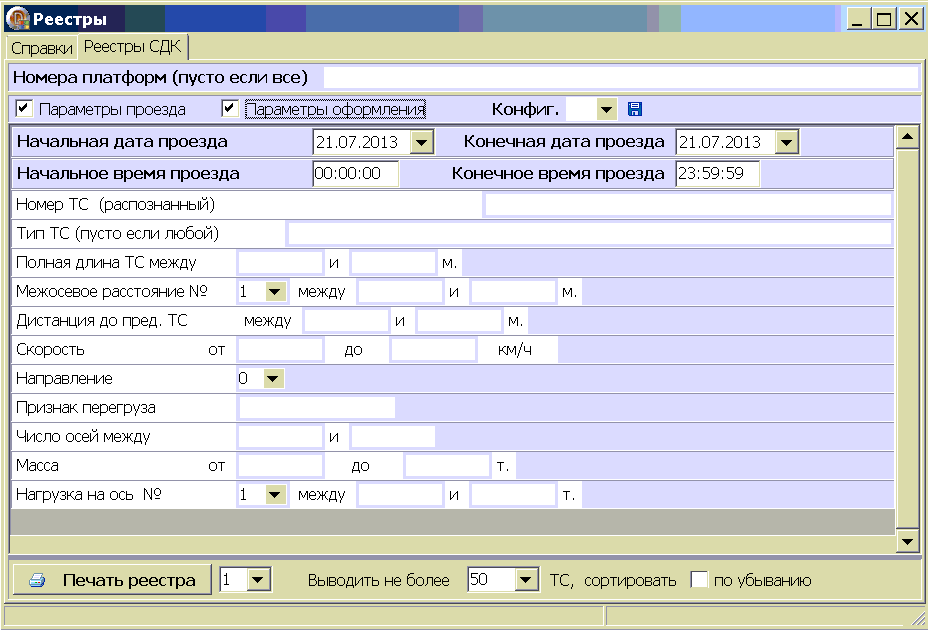
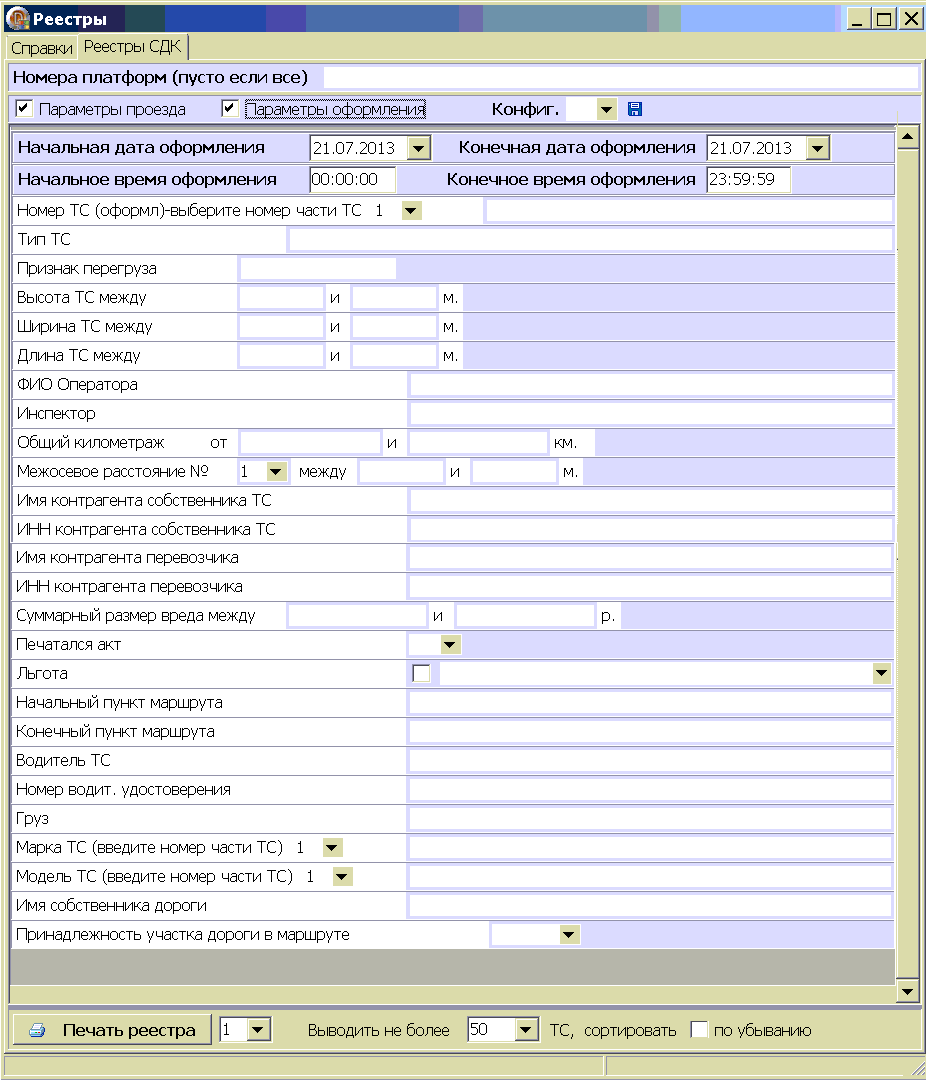
Признаки, по которым формируется реестр, можно сохранять и вызывать повторно по номеру конфигурации. Для сохранения рядом с полем номера Конфигурации есть значок с изображением дискеты (сохранить конфигурацию).
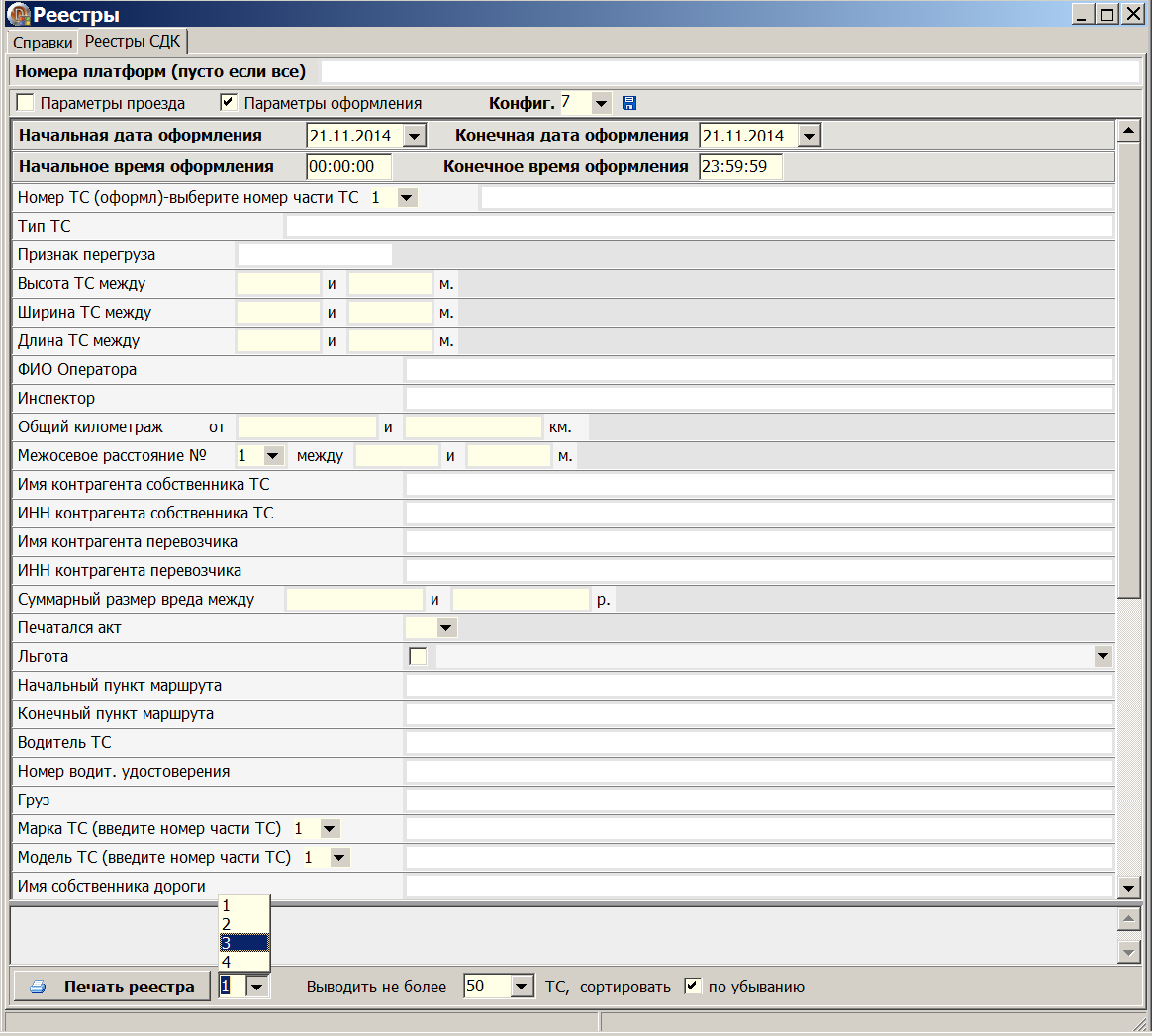
Примеры реестров (печать документа
с помощью кнопки – изображение принтера
в левом верхнем углу)
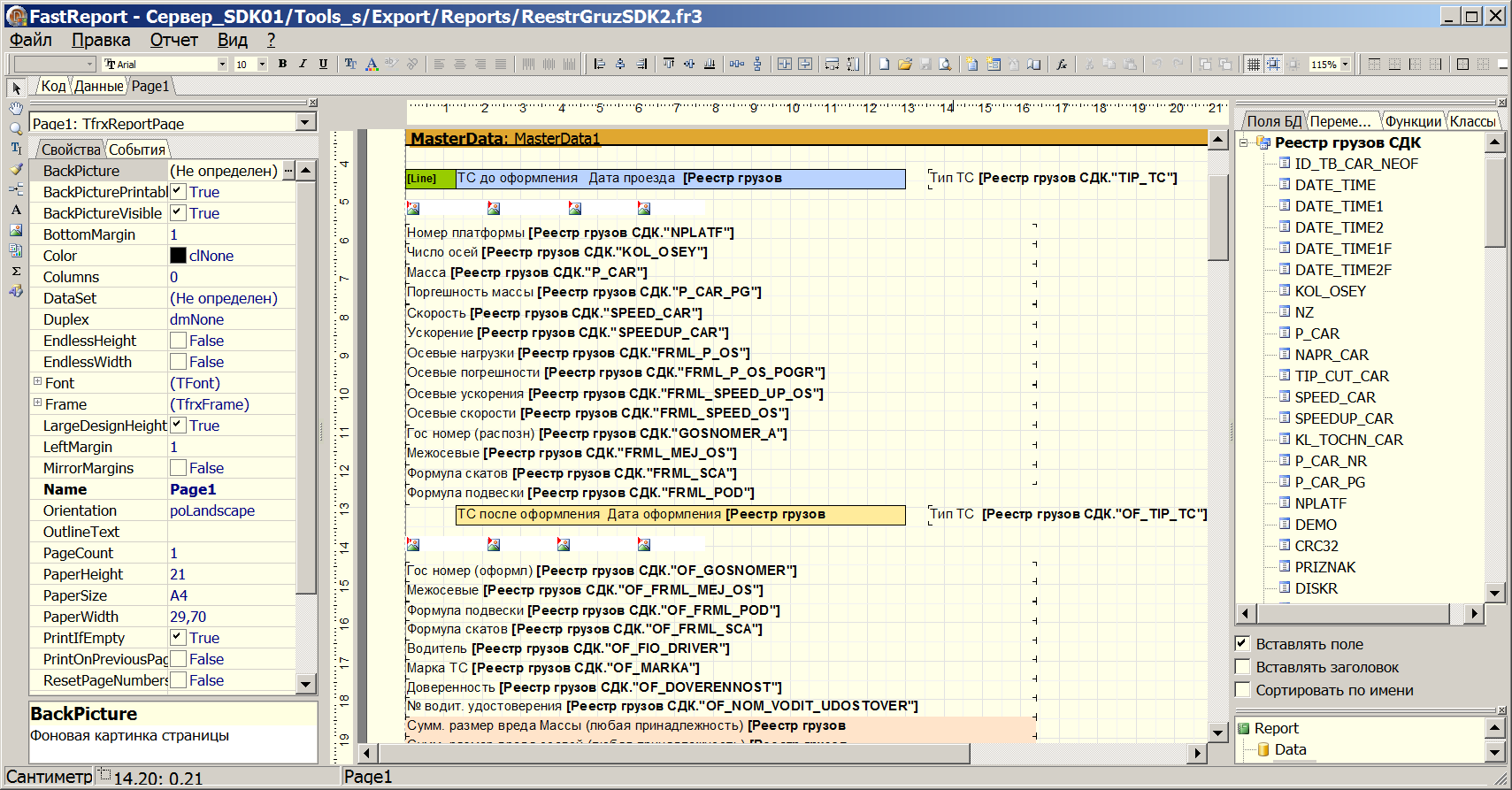
Пример редактирования формы реестров. Она может быть любая. Для редактирования используется стандартный редактор отчётов.
4.3 Завершение работы программы
Порядок приведения Системы в исходное положение и порядок ее выключения определен диалоговым интерфейсом и содержит операции, обратные относительно порядка включения.
Нормальный режим завершения работы (выход из программы) осуществляется нажатием «Х» в правом верхнем углу или по кнопке Выход. Накопленная за сеанс работы информация сохраняется в файлах рабочих каталогов Системы.
После выхода из программы необходимо выключить компьютер, источник питания, источник бесперебойного питания.
Если в электрической сети пропало напряжение, действуйте в соответствии с инструкцией к источнику бесперебойного питания. В этом случаем раздаются предупредительные сигналы и загорается соответствующий индикатор. В течение 3-5 минут необходимо завершить работу. В противном случае информация и работоспособность программы могут не сохраниться.
Дополнительные указания по работе с Системой, изложены в документе «Руководство по эксплуатации. СДК.Ам-000-000 РЭ».
Лист изменений (История)
----------------------------------------------------------------------------------------------------------
1-04.11.15
В Клиент и в Сервер добавлена возможность отслеживать состояние связи между ними и если её нет, то в клиенте появляется красная полоска внизу (статус-бар закрашивается красным).
В Сервере включена поддержка распознавания-2 от Мегалиб.
Улучшена стабильность распознавания-1 (считывание буфера картинки из глобального класса в поток сделал в той же критической секции что и запись туда - не стало накладок.)
надо менять и Клиент, и Сервер.
2-12.11.15
В Сервере исправлена ошибка (в настройках распознавания-2 не сохраняло размеры кадра по умолчанию)
В файл экспорта XML (по просьбе Калининград для табло)
добавились следующие поля
-осевые нормы TrackTrust1Normal, TrackTrust2Normal.. TrackTrust8Normal
-нормы на полную массу TrackThrustNormal
-переменная о нарушении, строка - TrackExcessGrossWeight (любом неважно по осям или по массе)
в опти автоматом создадутся соответствующие настройки
надо менять и Клиент, и Сервер.
3-21.11.15
В Сервере незначительные полезные изменения (+убраны кнопки загрузить участки из файла и сохранить участки в файл)
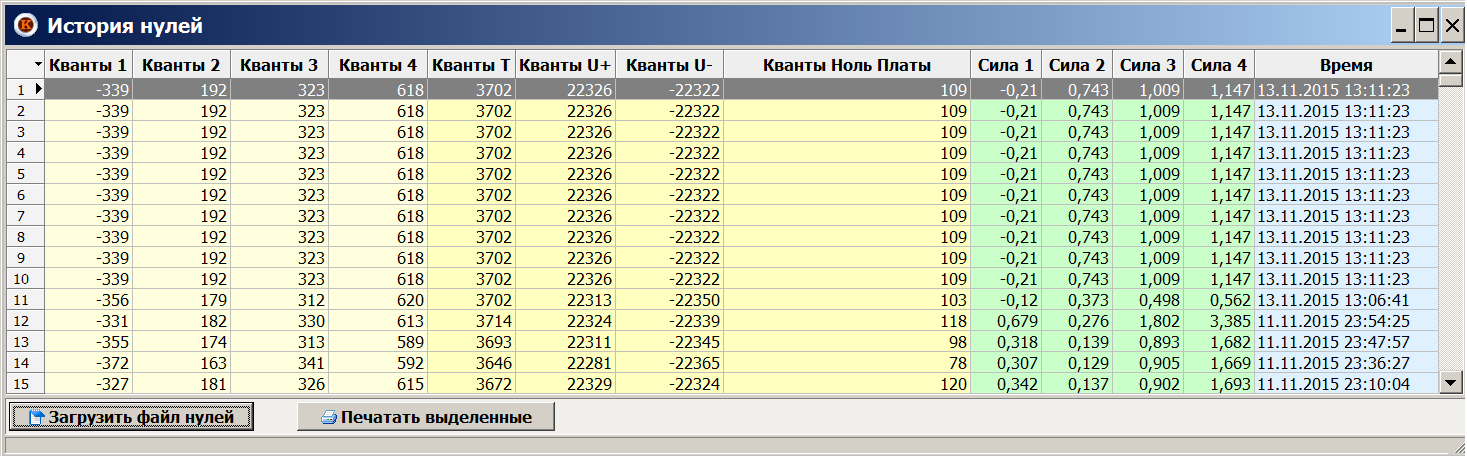
В Клиенте добавилась возможность прямо из диагностики видеть ИСТОРИЮ НУЛЕЙ - по кнопке История нулей, описание см. в программе.
надо менять и Клиент, и Сервер
4-16.12.15
В Клиенте уменьшена скорость воспроизведения в демоверсии т.к. было слишком быстро, теперь нормализовано.
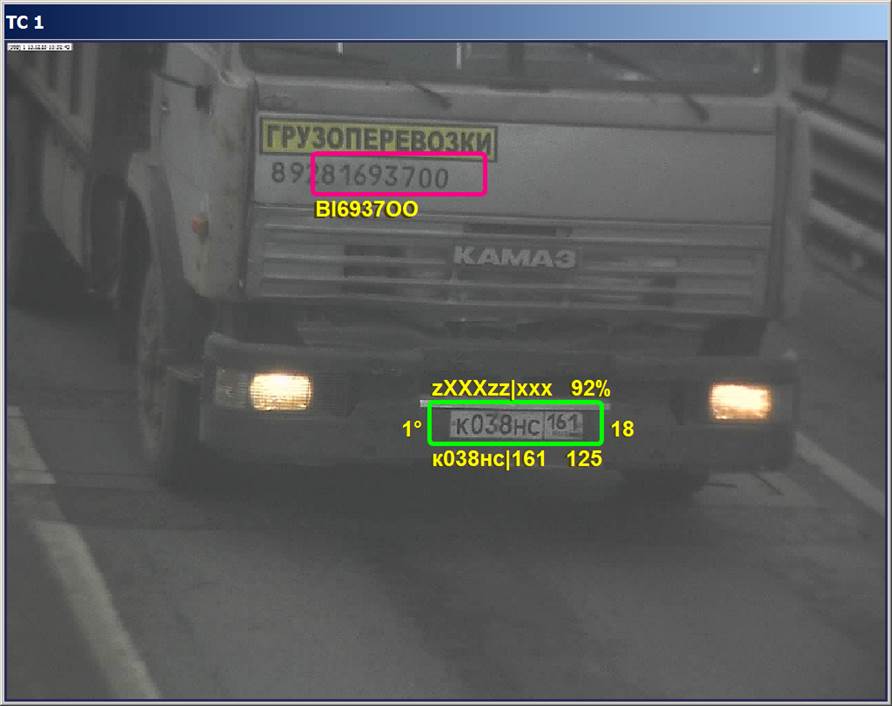
В Сервере внедрён гладко-меняющийся метод визуализации параметров для версии распознавания -2
(положение пластины, вероятность распознавания, гипотеза, угол наклона пластины к горизонту и др.)
Срабатывает сразу после распознавания номера, ещё до фиксации машины, т.е. в реальном времени.
Показывает так же найденную зону с более низкой вероятностью распознавания, если она есть.
Работает на любом распознающем канале:
Гладко масштабируется:
Визуализацией можно управлять из меню:
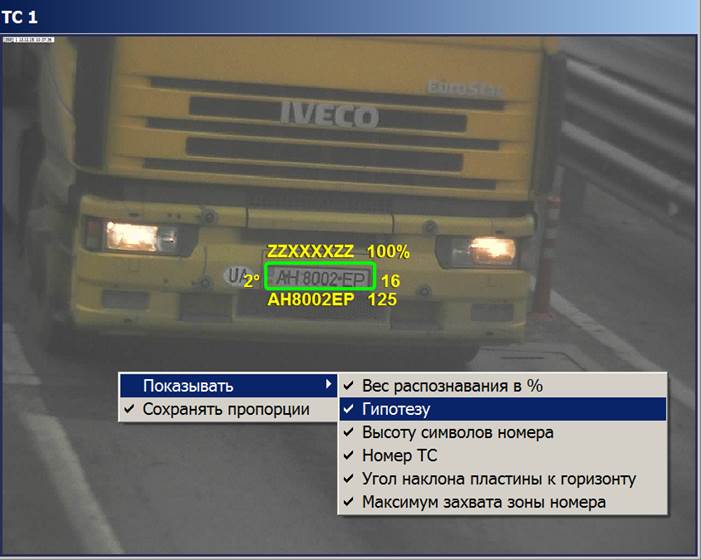
Так же добавлена возможность управлять дополнительными 4-мя реле, помимо основных, участвующих в автоматических процедурах, даже если в настройках отключено управление светофорами:
В программе при наличии активированной системы управления движением всё равно будут присутствовать
доп. кнопки:
Надо менять, клиент, сервер, и в папку D:\SDK\sr1\Tools_s\Data надо положить файл визуализации
Nomer_Pic.swf
5-18.01.16
1-Введён параметр "Порядок захвата видео 12 или 21" - указывающий в каком порядке производить захват видеокадра с камер 1 и 2, а также паузы в мсек перед таким захватом.
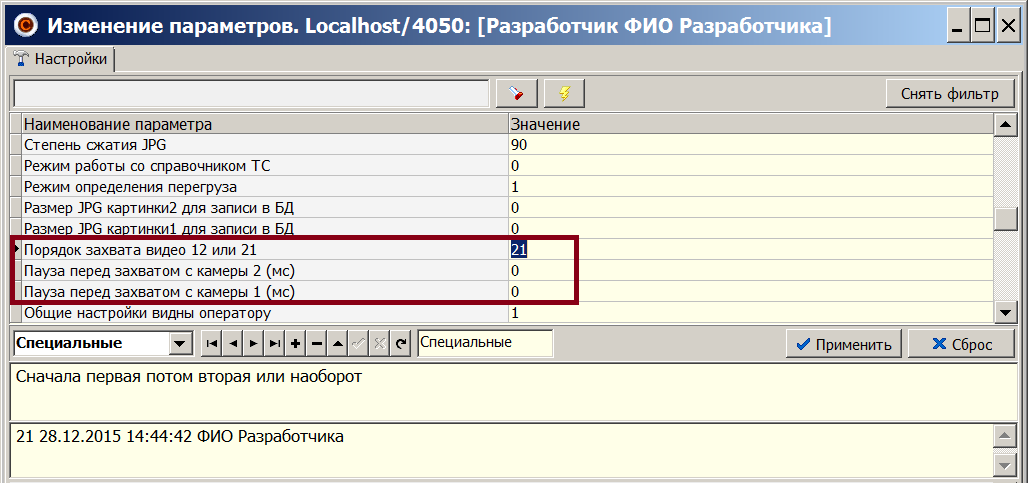
В программе захват c камер происходит по очереди и если видеопоток IP камеры (вариант вставки IP камеры не в сетевую плату компьютера - что желательно, а в недорогой роутер, который к тому же ещё и загружен другими задачами, или камера априори работает с задержкой из-за слабого внутреннего процессора, или на компьютере антивирус фильтрует входящий траффик с камеры), поступает с задержкой, может возникать такая ситуация:

У камер от AXIS это явление - большая редкость, но у камер RVI это наблюдалось на некоторых компьютерах.
Чтобы улучшить ситуацию, можно в настройках поставить сначала захват с камеры 2 (аналоговая), потом задержка 300мс-600мс перед захватом с камеры 1 (IP). Это может улучшить ситуацию, но с опасностью что при увеличении скоростей машина будет проскакивать мимо зоны захвата. В таком случае идеальный вариант соединять IP камеры напрямую (в компьютере должна быть ещё одна сетевая карта, т.к. один разъём обычно занят под интернет), или использовать более скоростные и менее загруженные роутеры.
Также замечено что днём это явление минимально, а ночью задержка увеличивается - вывод: задержка зависит также и от степени освещённости всей зоны.
2-При переносе рабочего каталога на компьютер с меньшим разрешением чем ранее, могли выходить за площадь экрана некоторые окна (окна камер, картинки ТС, окна последнего транспорта). Теперь программа при необходимости автоматически вернёт такие окна в рабочую площадь экрана.
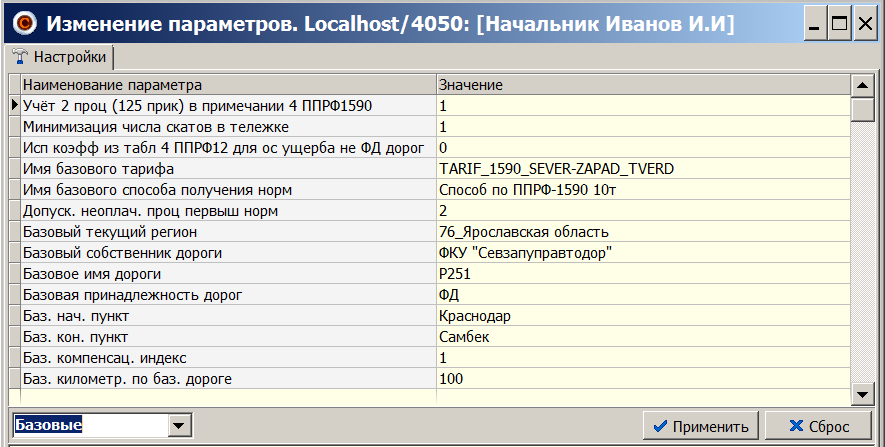
3- Введён новый способ определения перегруза в программе и представления итоговых результатов в акте и расчетном листе. Переход к новому режиму работы производится после входа в программу по паролю руководителя или наладчика установкой значения «1» в строке Режим определения перегруза меню Настройки, Специальные. Значение «0» оставляет прежний режим работы.
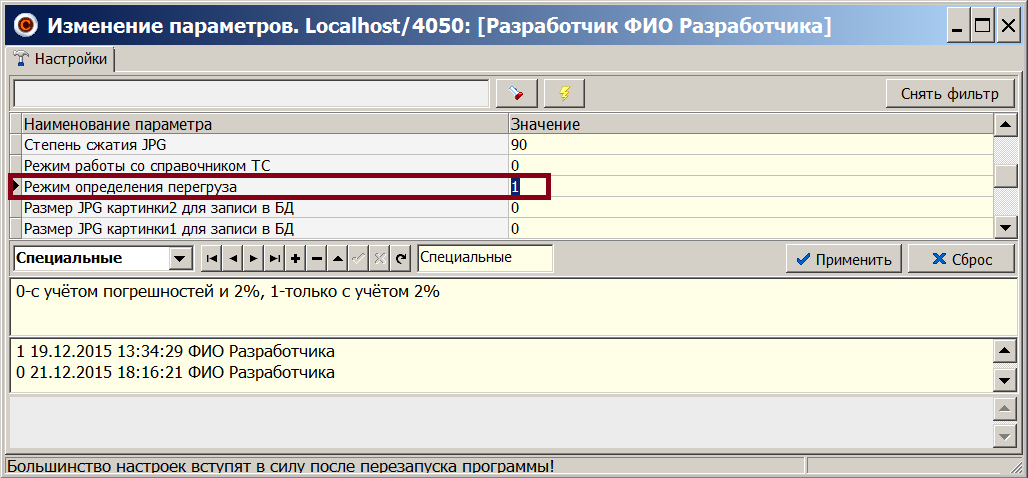
Способ 1 (режим определения перегруза=0 в настройках). Вычисляется превышение в тоннах фактических (измеренных) значений над допустимыми (нормативными) с учетом погрешности измерений системы СДК.Ам. Далее определяется превышение в процентах относительно допустимых значений. Если превышение в процентах более 2%, то перегруз есть, и он равен превышению:
Превышение(т) = Фактическая(т) - (Норма(т) + Погрешность(т))
Превышение (%) = (Превышение(т) * 100) / Норма(т)
Если Превышение (%)> 2, то Перегруз есть, и он равен Превышению (%).
Объяснение: Здесь погрешность взвешивания, автоматически определяемая программой, полностью идёт в пользу перевозчика, а 2% от нормы играют роль допуска при определении перегруза. Например, возмещение вреда дорожному покрытию по ПП РФ № 1590 от 28.12.2014 г. или определение величины штрафа в соответствии с КоАП РФ будут выбираться из таблиц в соответствии с этим процентным превышением, но при условии, если оно более 2%.
Способ 2* (режим определения перегруза=1 в настройках). Вычисляется превышение в тоннах фактических (измеренных) значений над допустимыми (нормативными). Далее определяется превышение в процентах относительно допустимых значений. Если превышение в процентах более 2%, то перегруз есть, и он равен превышению:
Превышение(т) = Фактическая(т) - Норма(т)
Превышение (%) = (Превышение(т) * 100) / Норма(т)
Если Превышение (%)> 2, то Перегруз есть, и он равен Превышению (%).
Объяснение: Здесь 2% от нормы, как и в способе 1, играют роль допуска при определении перегруза. При величине меньше или равной 2% перегруз отсутствует. Но в отличие от способа 1, погрешность измерений не учитывается. Например, возмещение вреда дорожному покрытию по ПП РФ № 1590 от 28.12.2014 г. или определение величины штрафа в соответствии с КоАП РФ будут выбираться из таблиц в соответствии с этим процентным превышением, но при условии, если оно более 2%.
Таким образом, оба способа учитывают пункт 4 приказа № 125 Министерства транспорта РФ от 27 апреля 2011 г. «Допускается расхождение весовых параметров ТС, определенных по результатам взвешивания, от установленных на территории РФ или указанных в специальном разрешении, если оно не превышает 2%». При контрольных взвешиваниях в статике погрешность измерений осевых нагрузок и массы ТС в основном интервале значений равна 1% и оба способа дают сопоставимые величины. Но в способе 1 дополнительно учитывается погрешность измерений (в пользу перевозчика) при вычислении превышения, что позволяет использовать его и при оформлении ТС в динамике. В способе 2 в динамике погрешность измерений может превышать 2% от норм, и оформление в таких случаях не рекомендуется. Если же взвешивание в динамике производится на выявление ТС с возможным перегрузом с последующим контрольным взвешиванием, то это вполне допустимо.
* Активируется НИПВФ "Тензор" только при предоставлении заказчиком официального подтверждения своего центра управления (федерального или регионального в зависимости от типа подчинённости) на возможность использования такого режима работы.
-------------
менять надо сервер.
6-23.01.16
Введена возможность задавать различные минимальные предельные массы ТС, выше которых будет автоматическое обновление таблицы гл. архива (автоматически будет нажата кнопка "Обновить")
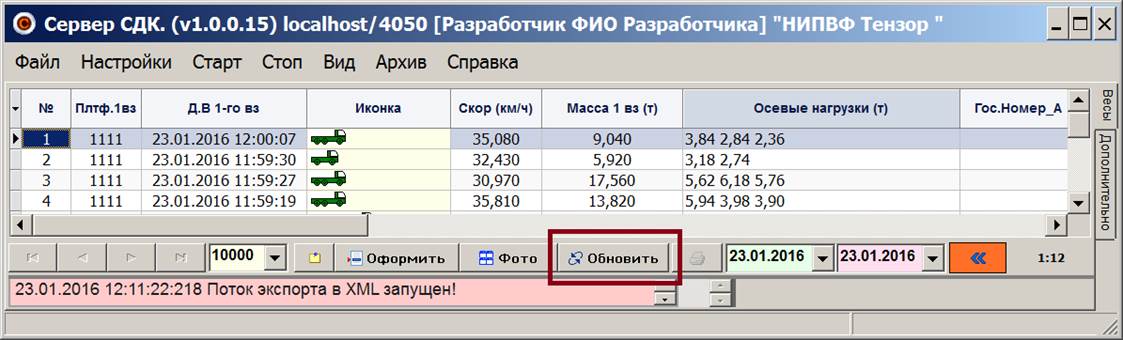
Причём эта функция будет работать даже если сервер подключён к удалённой базе данных, по сети или интернет, при условии активированной возможности "Система передачи данных"-удобно если нужно online Мони торить удалённый пост или сервер, напрямую подключившись к его БД.
Все остальные условия, ограничивающие выборку с сервера
продолжают действовать (по распознанному номеру, массе, номеру платформы, и др.).
Эти пределы задаются из ряда значений: [0; 1; 2; 3,5; 6; 8; 10], т.е. появилась возможность автоматически обновлять даже на легковых ТС, с весом меньше 3,5т.
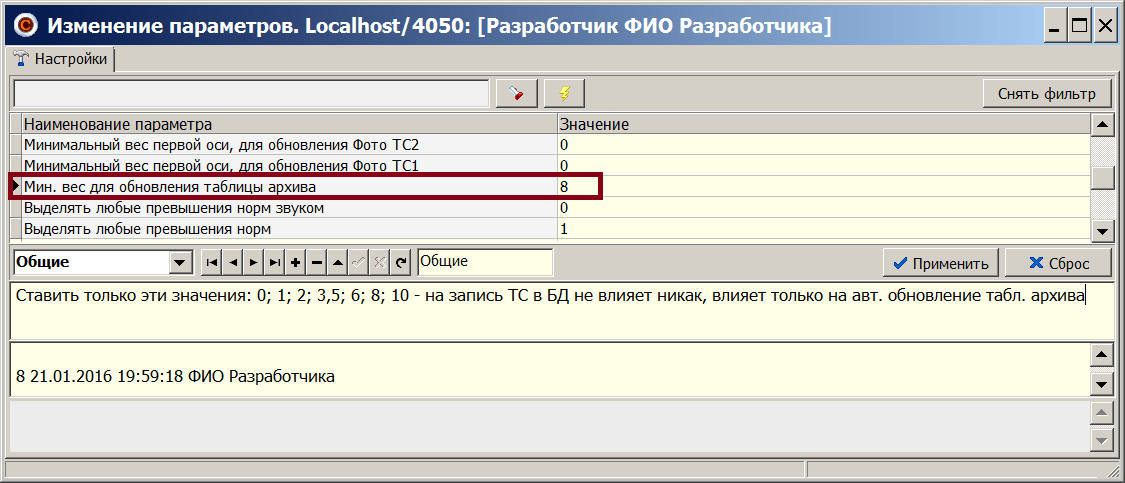
(Раньше был один предел 3,5 т ниже которого таблица архива автоматически не обновлялась, связано это было с тем что на некоторых постах через весы проезжало большое количество легковых ТС, более 10000 в день, и эта информация была избыточна для операторов.)
------
Надо менять сервер и менять триггер в БД [TB_CAR_NEOF_AIU_POST_EVENT] (делается дистанционно через интернет или сразу начинает работать с новой БД)
7-26.01.16 Изменения в Сендере. (входит в состав системы передачи данных)
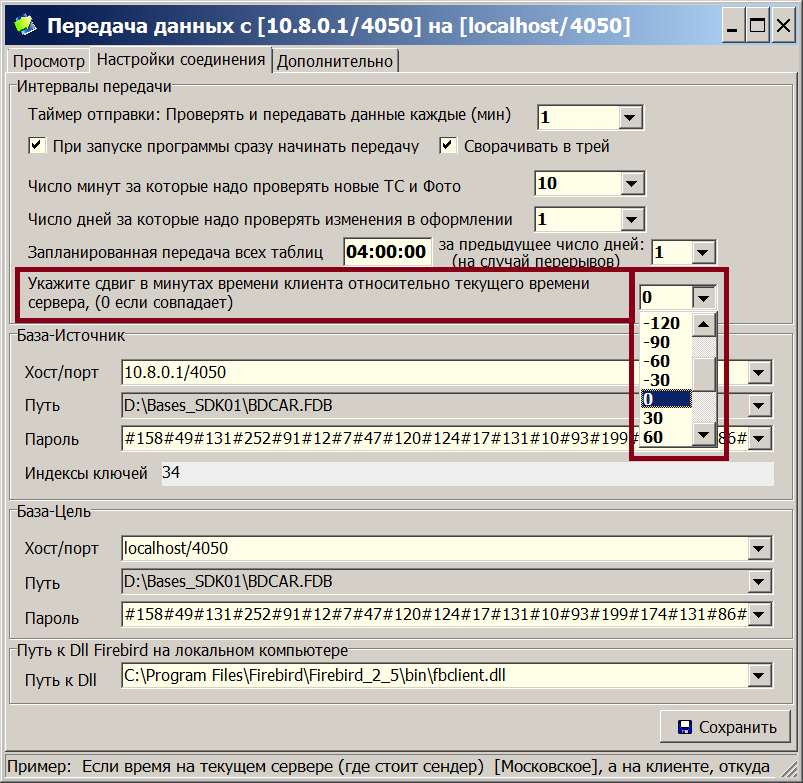
Добавилась новая настройка, указывающая
временной сдвиг на [базе - источник] относительно [базы-цель]
Например, если надо забирать данные с БД в Калининграде (Время Московское-1ч) в БД в Москве (время Московское), то нужно установить [-1ч.].
Иногда нужно передавать данные с базы источника в базу цель, но, чтобы сендер был установлен на третьем компьютере, т.е. на этот третий компьютер данные физически попадают как бы проездом.
Например, если на компьютере где находится база цель время отстаёт от Московского на 1ч. и на компьютере где расположена база-источник время также отстаёт от Московского на 1ч, а на третьем компьютере, который
установлен в Москве и на котором работает сендер, стоит время Московское, то сдвиг нужно ставить = 0.
Менять надо только сендер. (с сохранением старого имени файла, т.к. все ini файлы с настройками берут имя исполняемого файла.)
8-07.05.16 Изменения в Server_Car
8.1 Добавилась возможность распознавать номер не только по кадру во время наезда первой оси ТС
но и делать это подряд несколько раз с заданным интервалом в кадрах видеопотока.
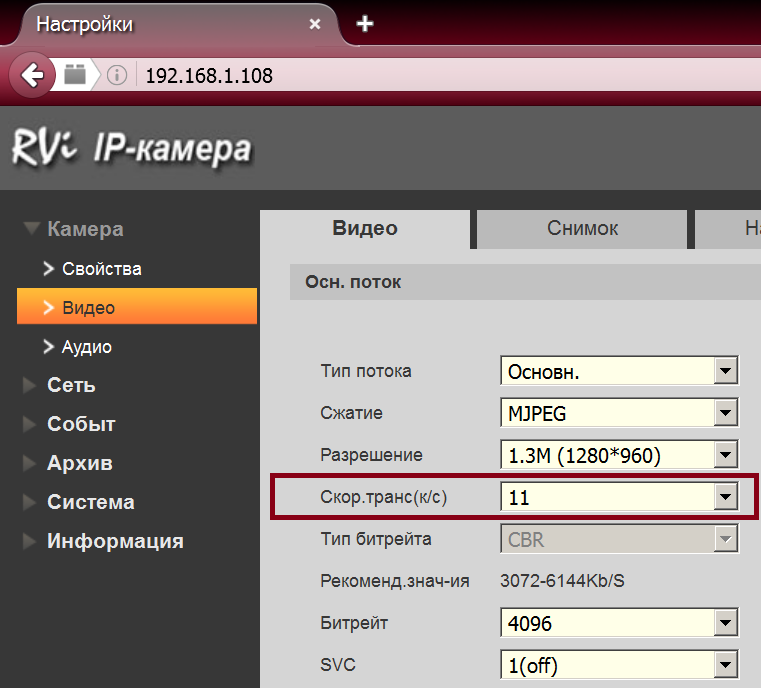
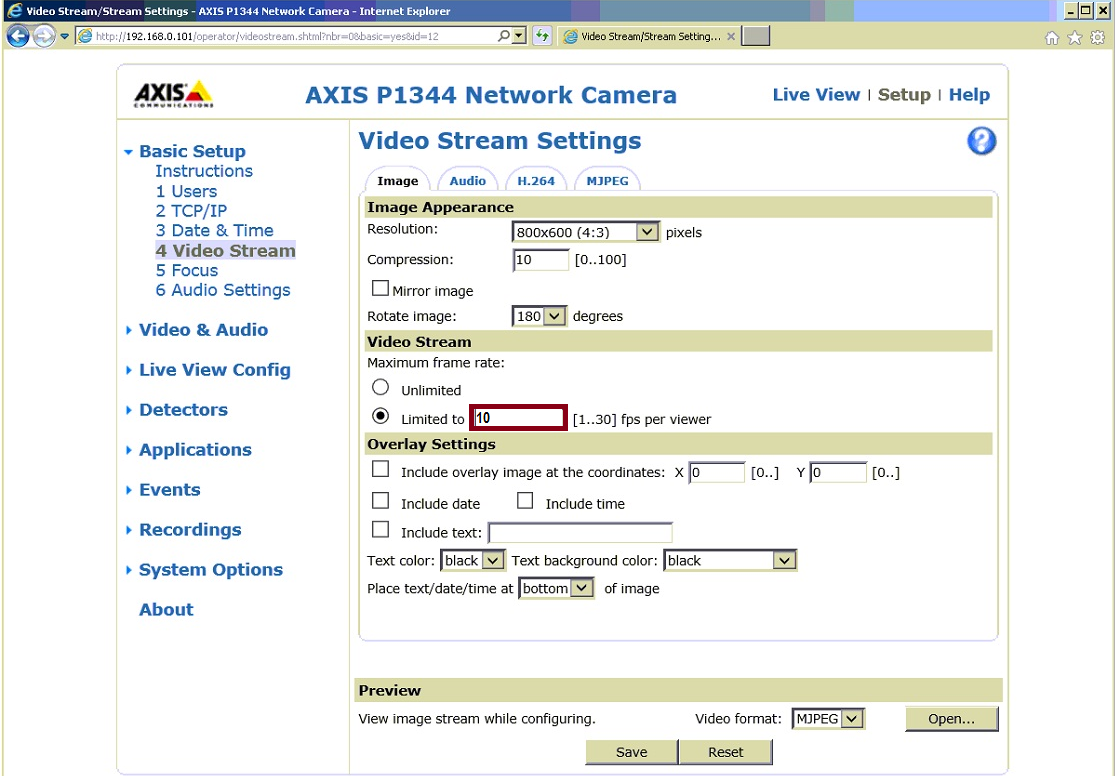
Программа обрабатывает кадры с камеры, которые идут с заданной в настройках камеры частотой:
(скорость транслирования кадров в секунду, для ip камер рекомендуем от 8 до 11 к/c - установлено эмпирически), см рисунок.
Для RVI:
Для Axis:
Теперь программа может распознавать номер с одного, двух, трёх кадров
после сигнала о наезде первой оси, с пропуском
между ними, 1,2,3,5 и более кадров (настраивается по месту в зависимости от скоростей ТС)
Для 1й и 2й камер введены настройки:
В результате в окне фото последнего транспорта можно будет увидеть такую картину:
www.sdkpro.ru:8070/sdkhelp/less/Documents/Ruk_Operatora/files/3kad.avi
www.sdkpro.ru:8070/sdkhelp/less/Documents/Ruk_Operatora/files/3kad.gif

Благодаря нововведению удалось поднять качество распознавания, в том числе и на местах с неудачным освещением.
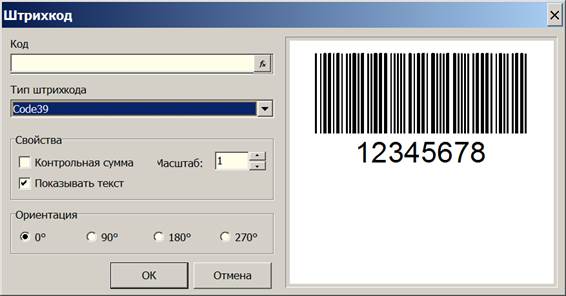
8.2 Появилась возможность в любых печатаемых документах, актах, чеках, справках, реестрах и т.д. использовать QR-код
(http://qr-pr.ru/qr-code), в который можно включать по требованию заказчика любые поля.
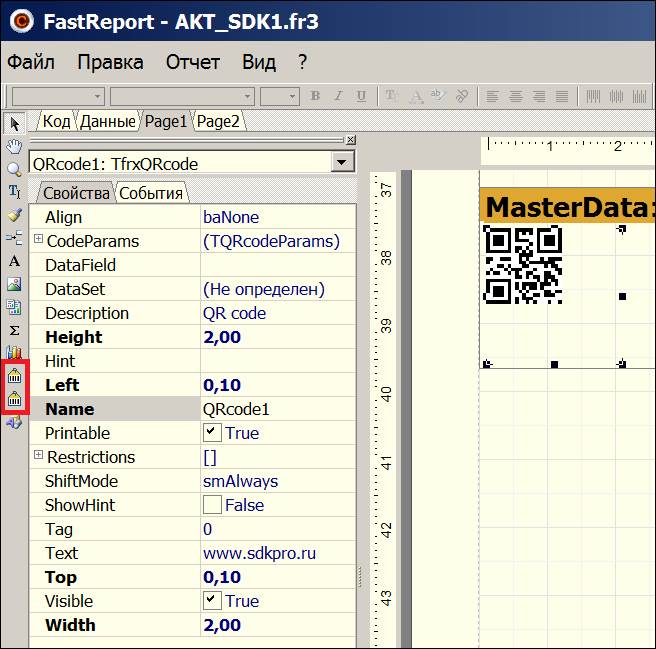
В программе применение QR-кода реализовано следующим образом:
При печати, например, акта взвешивания, в документ автоматически добавляется сгенерированный QR-код:

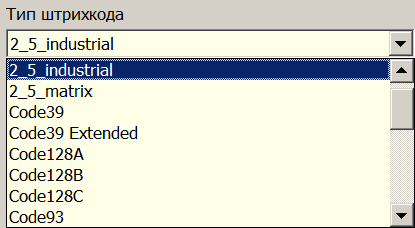
А также при необходимости все виды штрих-кодов:
Эти значки и объекты добавлены в редактор форм - выделены красным:
При наведении на код любым смартфоном с установленной программой
чтения штрих кодов (например, если для андроид, то лучше этой:
https://play.google.com/store/apps/details?id=com.androidrocker.qrscanner)
может быть прочитана информация, в которой в открытом виде указаны основные параметры взвешивания:
Гос. номер =в890хм|10
Время =05.05.2016-17:33:12
№ весов =9980
№ акта =51547459389
а также эти же параметры, но зашифрованные в гиперссылке на наш сайт
Проверить подлинность
через Интернет:
http://www.sdkpro.ru:8070/sdkhelp/less/Code_Check1/Check1/index.html?val1...
При нажатии на эту ссылку мы попадаем на сервер Тензор, где зашифрованные данные расшифровываются и выводятся в виде таблицы:
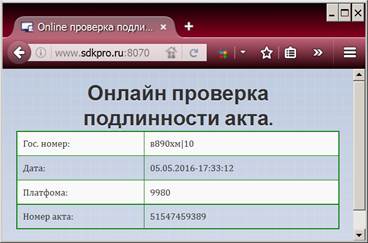
Если данные указанные в штрих-коде совпали с расшифрованными данными, которые вернул сервер, то можно считать, что подлинность документа подтверждена.
Данное нововведение полностью лишает смысла подделку и фальсификацию
документов водителями.
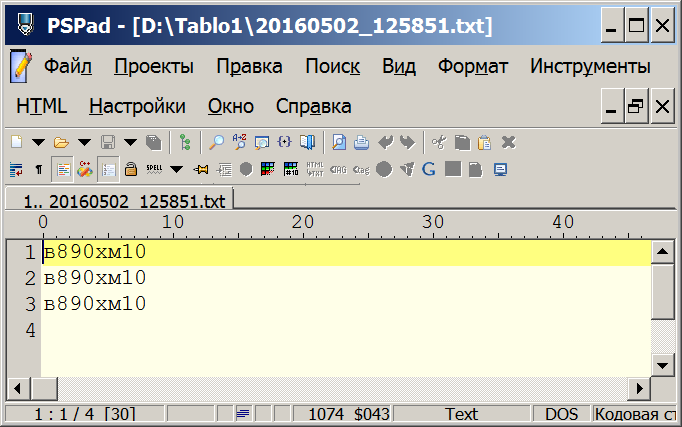
8.3 Появилась возможность работать со всеми возможными видами табло.
Условием является способность программы табло считывать текстовые файлы с заданной
периодичностью из указанной папки и выводить содержимое на экран табло.
Так же по согласованию с разработчиками таблоесть возможность передавать данные в программу табло напрямую, минуя промежуточные файлы (что снижает нагрузку на жёсткий диск), через различные механизмы обмена (pipes, сокеты, очереди сообщений windows, файлы в памяти и т.д.)
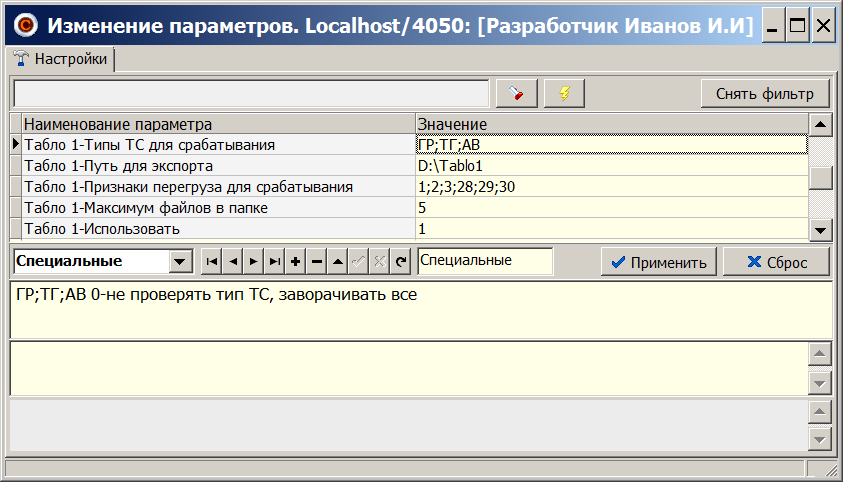
Введены следующие настройки:
Также в отдельное окно выводятся те же данные что и на табло. У окна есть возможность задавать размеры, позицию, размер и цвет шрифта, цвет фона. Поэтому это окно можно транслировать на второй монитор или экран, и этот экран уже использовать как ещё одно табло, в пределах возможности его подключения.
На табло можно выводить как все ТС, так и только те, которые имеют необходимый признак перегруза (по осям или по массе) и имеют соответствующий тип (например, грузовики, грузовики с прицепами, тягачи с полуприцепами и т.д.). Табло может устанавливаться перед поворотом на контрольные весы, и сигнализировать водителю повернуть на контрольное взвешивание.


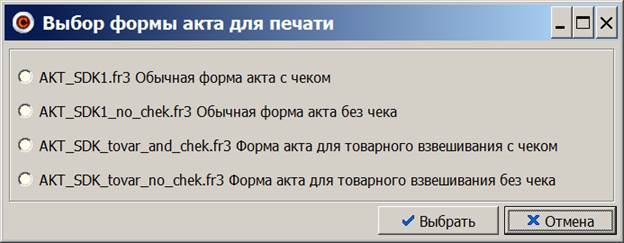
8.4 Появилась возможность использовать одновременно несколько разных форм актов, без переименования форм.
Для этого формы должны быть готовы и должны находиться в папке по умолчанию
D:\SDK\sr1\Tools_s\Export\Reports. Там же должен быть файл список используемых форм:
Список_имён_форм_актов.txt следующего содержания:
1 AKT_SDK1.fr3 Обычная форма акта c чеком
2 AKT_SDK1_no_chek.fr3 Обычная форма акта без чека
3 AKT_SDK_tovar_and_chek.fr3 Форма акта для товарного взвешивания с чеком
4 AKT_SDK_tovar_no_chek.fr3 Форма акта для товарного взвешивания без чека
Этот список (нормированные строки) содержит номера, имена форм актов (без пробелов) для печати,
и пояснения, всё через пробели в ansi кодировке.
Все указанные в этом списке формы должны находиться в данном каталоге.
D:\SDK\sr1\Tools_s\Export\Reports
Минимальное число указанных форм 1 шт., максимальное - не ограничено.
Программа перед печатью прочтёт в начале файла нумерованные строки с разделителями
и предложит оператору выбрать ту форму из списка, которую ему нужно напечатать.
Все формы имеют защиту QR кодом с проверкой подлинности на сервере "Тензор".
Пример формы для предоставления в ДПС, УГДН и т.д.:
http://www.sdkpro.ru:8070/sdkhelp/less/documents/acts/Act-1-KL.pdf
Пример формы для товарного взвешивания на основе формы международного сертификата взвешивания:
http://www.sdkpro.ru:8070/sdkhelp/less/documents/acts/act-2red.pdf
Формы могут быть любые и меняются как на месте, так и по почте в службе техподдержки "Тензор".
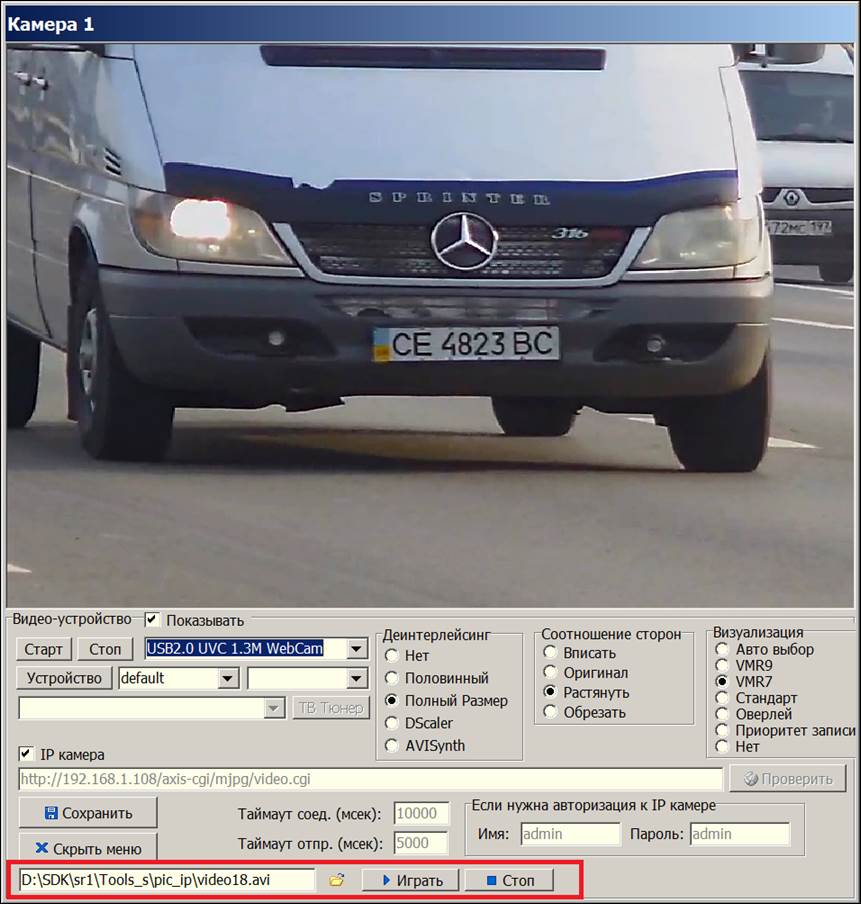
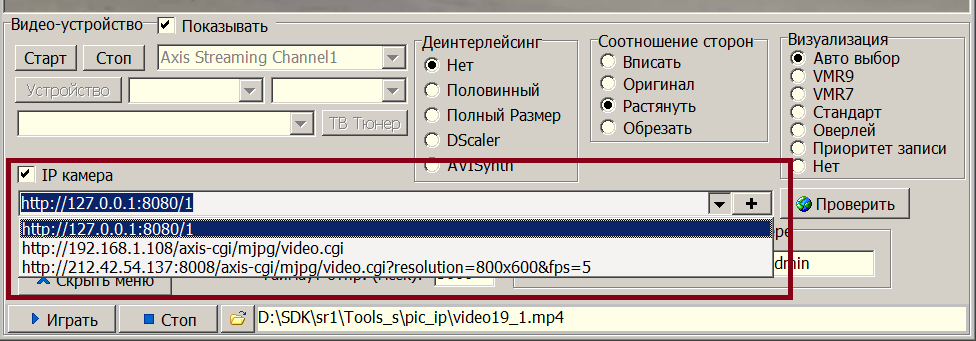
8.5 Появилась возможность использовать в демоверсии вместо реального сигнала с ip-камер, видео файл, который можно проигрывать по кругу прямо в программе.
Программа будет воспринимать это видео как источник видеосигнала и будет работать с ним как обычно.
Таким образом дифференцируются проблемы, связанные с качеством сигнала от камер.
 +
+
8.6 Появилась возможность использовать в демоверсии вместо реального сигнала с ip-камеры, видео файл, который можно проигрывать по кругу уже не в программе, а с помощью стандартного видеоплейера "VLC media player".
VLC media player будет транслировать любой видеофайл в сеть в формате ip-камеры:
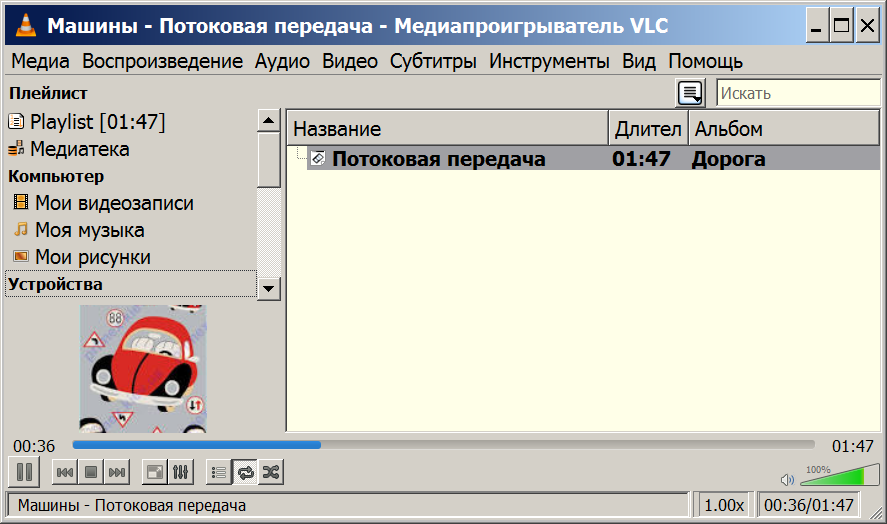
Программа воспринимает такой сигнал, как сигнал с ip камеры, например, по адресу
http://127.0.0.1:8080/1
Такой метод самый оптимальный для тестирования и диагностики, т.к. он не задействует ресурсы программы, будь то работа с фотографиями или воспроизведение внутри себя видео файла.
Тестирование с использованием картинок стало более не нужным и было исключено.
Достаточно создать специальный ярлык на трансляцию, нажать на него и видеопоток пойдёт в сеть. Инструкции
при необходимости можно уточнить в службе техподдержки "Тензор".
8.7 В окне видеокамер теперь есть возможность сохранить все используемые URL ip камер в специальном окне.
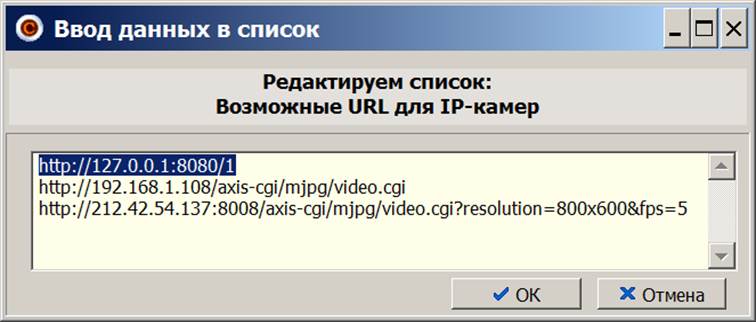
Там же их можно отредактировать. Список для каждой камеры свой.
И сейчас легко можно выбрать URL подключения:
------
Надо менять Server_Car
В папку с программой надо добавить файл quricol32.dll
9-22.07.16 Изменения в Server_Car
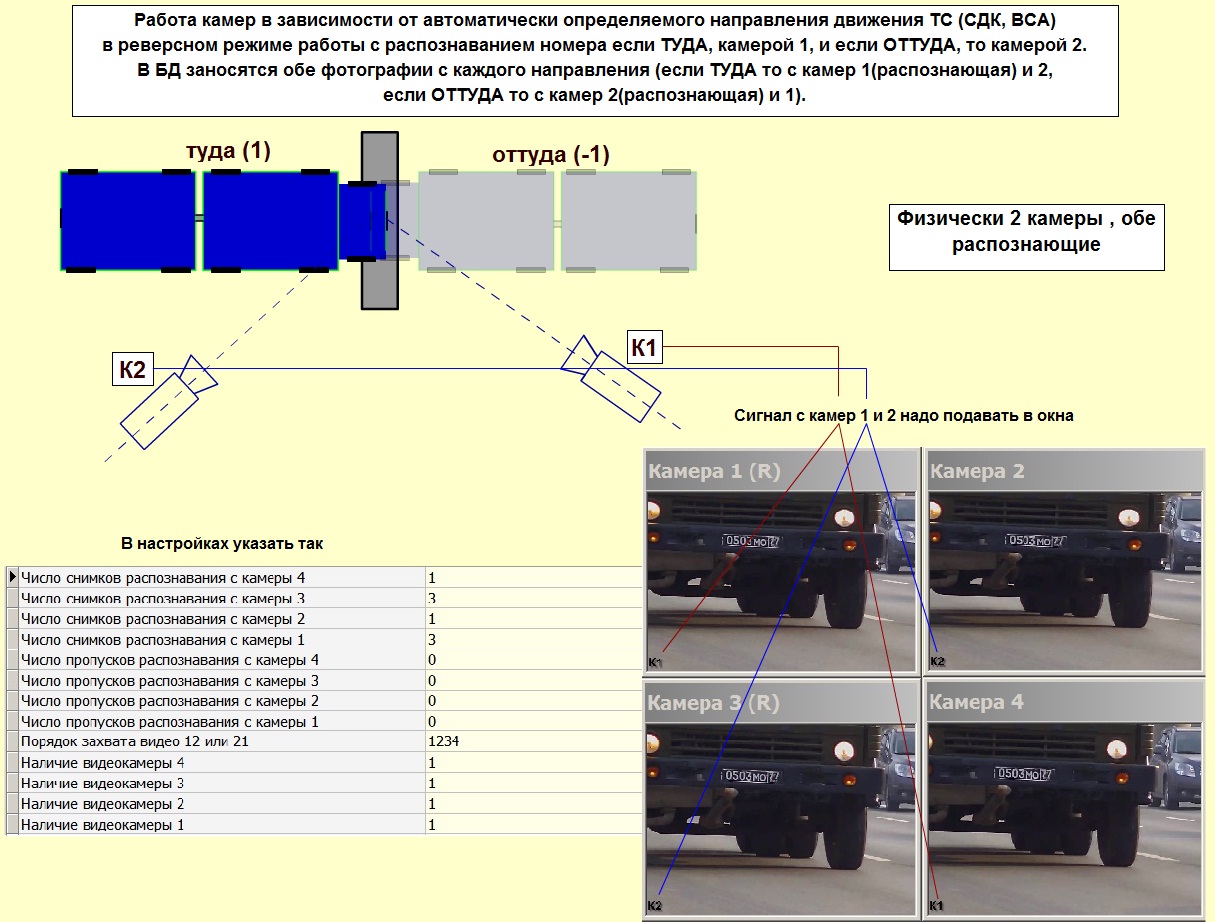
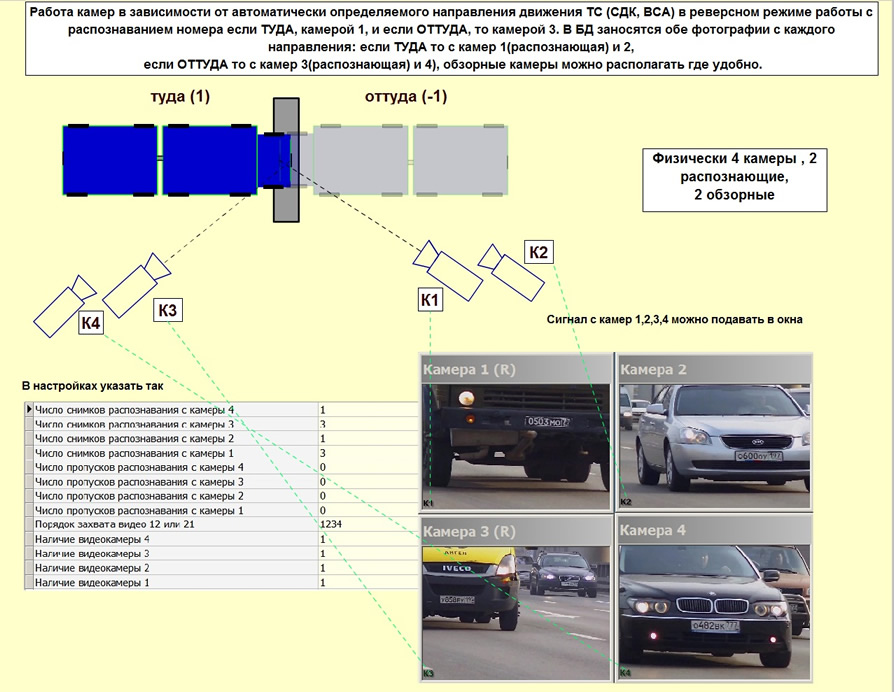
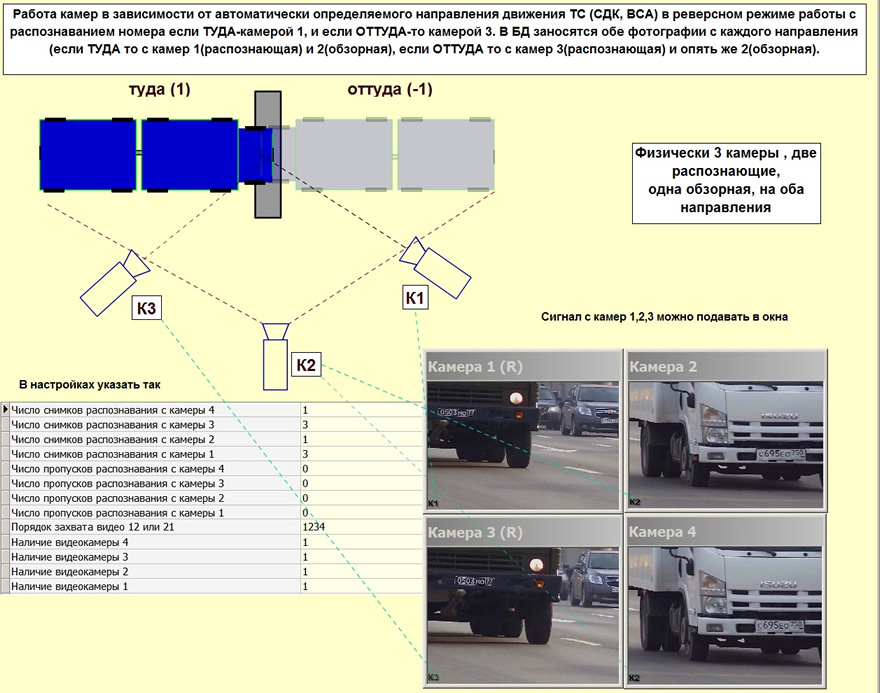
9.1 Появилась поддержка 4х камер и реверсного режима.
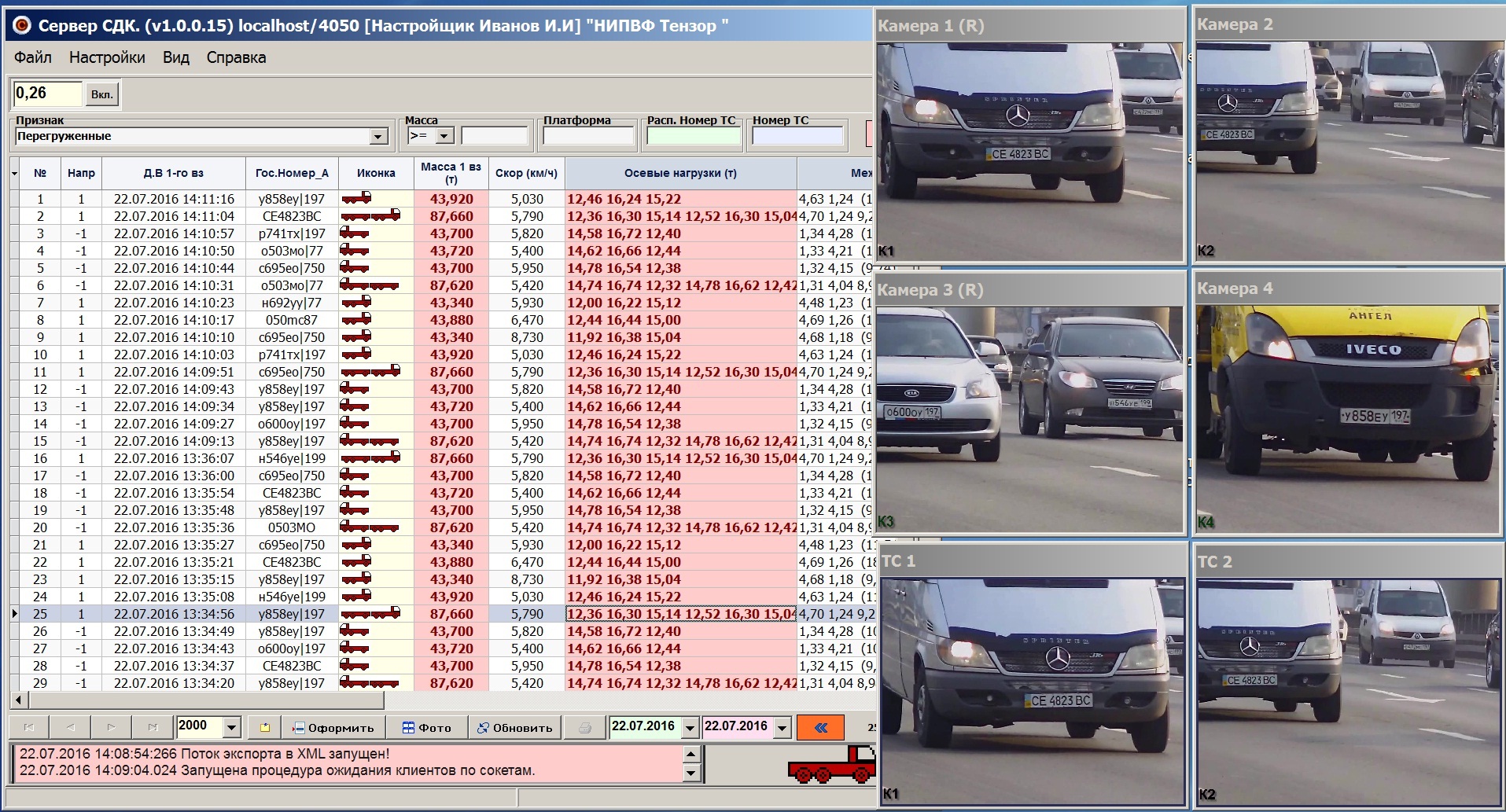
Программа автомтически определяет направление движения по весам и производит захват то с камер 1-2, то с камер 3-4. В (Опти->Специальные) появились следующие настройки:
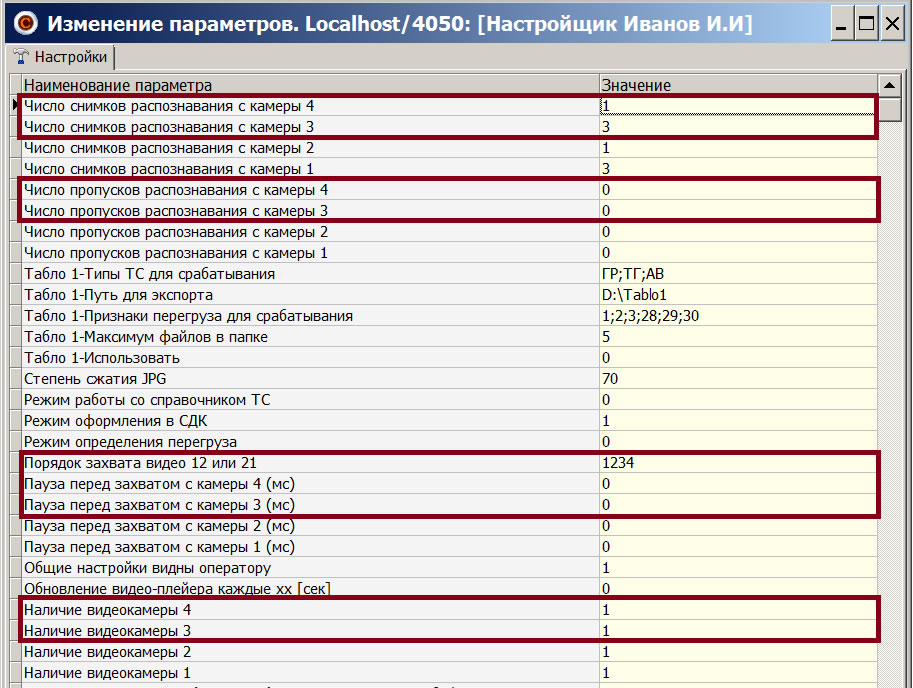
Настройка (Порядок захвата видео 12 или 21) теперь может принимать значения 1234 (Туда-захват с камер 1 и 2, оттуда - с камер 3 и 4) или 3412 (Туда-захват с камер 3 и 4, оттуда - с камер 1 и 2).
Это необходимо если весы установлены на территориях предприятий, или любых других мест где фиксируется и въезд и выезд.
Распознавание номеров ТС работает как на прямом направлении, так и на обратном.
Данные схемы работают как в динамике, так и при поосном взвешивании в статике.
В статике направление движения также определяется по мгновенной нагрузке на группы датчиков в момент превышения порга наезда как и в динамике.
По согласованию с заказчиком, возможны и другие схемы срабатывания захвата кадров в БД.
В программе Klient_Сar введено определение направления движения статике и передача его серверу.
------
Надо менять Server_Car и Klient_Сar
10-31.10.16 Изменения в Server_Car
10.1 Добавился режим упрощённого оформления.
Включается в Опти:
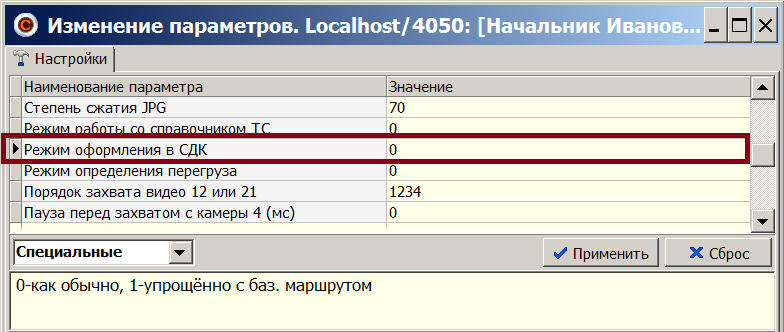
Применяется на заводах, предприятиях где при оформлении акцент делается не на проводе ТС по участкам маршрута с разными нормами перегруза, а на быстрое взвешивание и определение перегруза по заранее заданным параметрам базовой модели, но это не мешает в любой момент добавлять и другие участки маршрута с другими параметрами (нормы, собственник, коэфф. инфляции и т.д.). При таком виде оформления оператору надо лишь нажать одну кнопку ОФОРМИТЬ, программа автоматически считает из настроек заранее определённые параметры проезда (в Опти)
и вставит их в нужные поля.
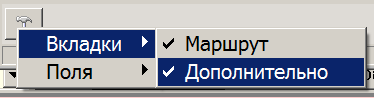
Дополнительно с формы оформления в таких случаях можно убрать редко используемые поля:
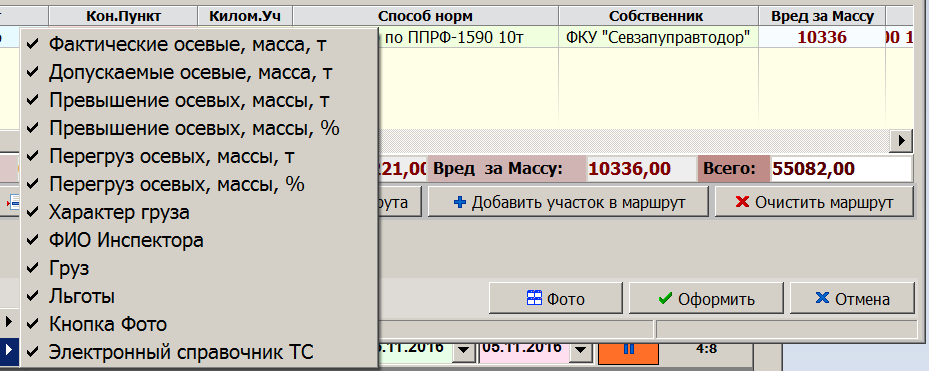
и даже целые вкладки:
Данная возможность значительно упрощает оформление ТС, но требует небольшой предварительной настройки.
10.2 Появилась возможность принудительно в указанное время перезапускать программу сервер, если вручную в конце смены это не делается.
Это желательно делать так как могут накапливаться ошибки приёма-передачи IP камер, и камеры могут начать вести себя некорректно. Так как не во всех IP камерах заложена внутри такая функциональность, то можно прямо здесь сбрасывать подключение, а заодно и все темповые буферы программы и Windows.
Для этого в Опти появились следующие настройки:
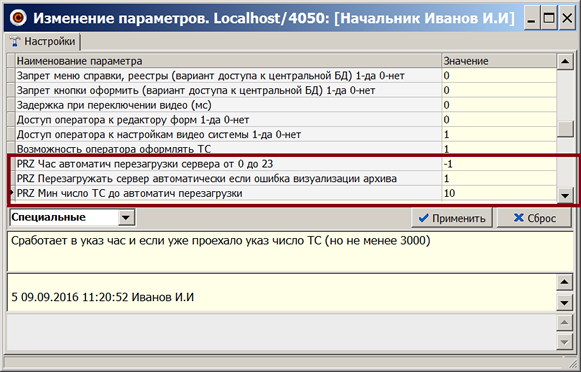
Параметр "PRZ Мин число ТС до автоматич перезагрузки" означает что автоперезапуск программы произойдёт только если число ТС превысило
указанное значение, естественно что при этом "PRZ Час автоматич перезагрузки сервера от 0 до 23" должен быть больше -1.
10.3 В клиент статических весов ВСА добавилась возможность
автоматически определять направление движения ТС по группам датчиков.
В связи с этим для данного клиента, а также для клиента весов СДК и сервера (см ранее п 9.1) разработаны дополнительные схемы работы камер в реверсе.
Это актуально для заводов, предприятий, полигонов, карьеров, где работа может происходить на одной платформе в двух направлениях.
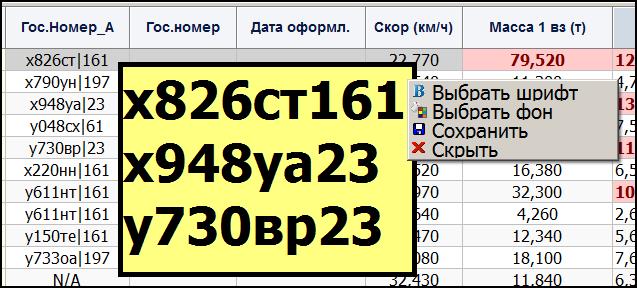
10.4 Появилась возможность автоматически обновлять фото и рисунок ТС из архива
в соответствии указанными признаками перегруза.
Раньше в критериях был только минимальный вес ТС для автообновления таблицы архива.
Это полезно если необходимо отслеживать весь поток (фото и рис. последнего транспорта), но дополнительно
автоматически выделяя и оставляя на экране
перегруженные ТС, которые будут запрашиваться из архива в соответствии с критериями отбора:
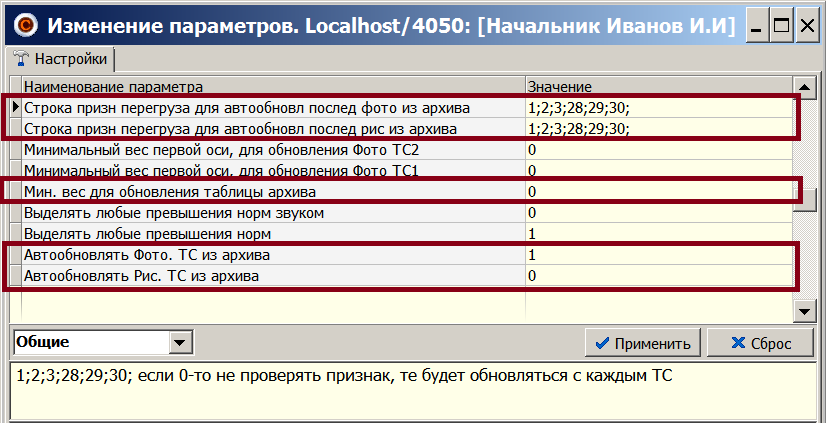
Таким образом рисунок и фото последнего пререгруженного ТС будет всегда находиться на экране
пока не будет заменён следующим пререгруженным ТС. Зафиксировать нужное ТС, чтобы оно не
сменялось другим перегруженным, можно нажав на паузу.
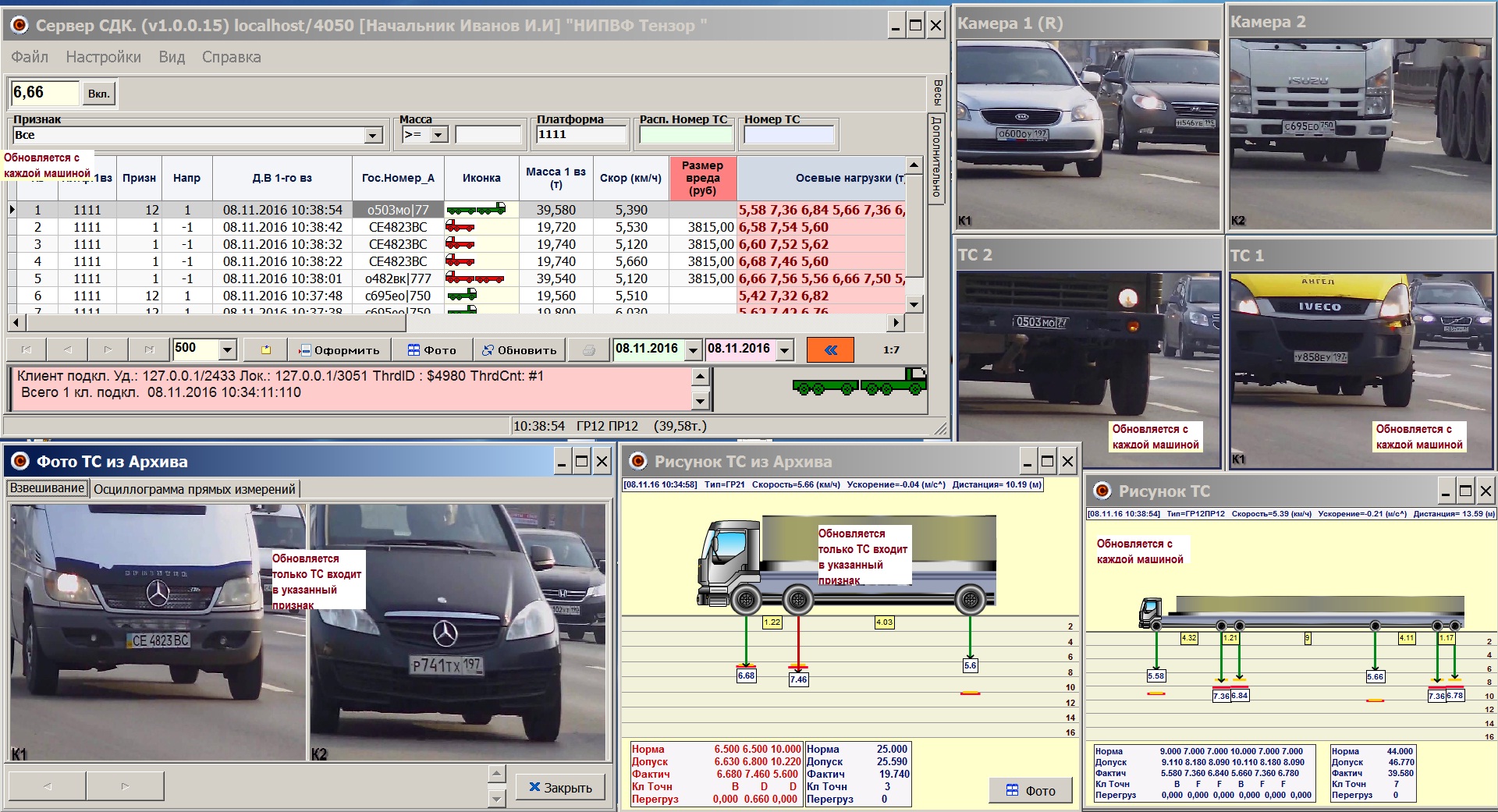
Все остальные ТС как и раньше будут автоматически отображаться в фото и рис. последнего ТС
10.5 В рамках работы по адаптации ПО к новому перспективному серверу баз данных Firebird 3, добавились строки в файле начального подключения Dop.txt, для клиента и сервера.
Текущая рабочая версия сервера БД: Firebird-2.5.2.26539_0_Win32
Находится данный файл для клиента тут: D:\SDK\kl1\Tools\Opti\dop.txt
для сервера тут: D:\SDK\sr1\Tools_s\Opti\dop.txt
Теперь данный файл вместо двух строк имеет 4 строки:
Путь к каталогу сервера Firebird
1-я: C:\Program Files\Firebird\Firebird-2.5.2.26539\Порт подключения к серверу Firebird (3050 не занимать!!!)
2-я: 4050
Путь к длл сервера Firebird
3-я: C:\Program Files\Firebird\Firebird-2.5.2.26539\bin\fbclient.dll
Путь к папке UDF сервера Firebird
4-я: C:\Program Files\Firebird\Firebird-2.5.2.26539\UDF
Ниже по необходимости могут быть включены и другие специальные параметры
-----------------------------------Чтобы новые версии СДК (клиента и сервера) заработали, надо заменить:
Server_car.exe, Klient_car.exe,
в файлы dop.txt клиента и сервера добавить ещё 2 строки:
3-я срока: C:\Program Files\Firebird\Firebird-2.5.2.26539\bin\fbclient.dll
4-я срока: C:\Program Files\Firebird\Firebird-2.5.2.26539\UDF
Так же если обновление производим для платформенных автомобильных весов ВСА, то надо заменить и сам клиент ВСА (Stat.exe).
Напоминание: Server_car.exe может работать совместно как с клиентами СДК, так и с клиентами ВСА, в зависимости от типа весовых платформ, установленных на объекте.
---------------------------------
11-29.12.16 Изменения в Klient_Car и в Opti_000_install.FDB (файл настроек клиента)
11.1 Добавлена проверка ввода ключевых значений в Опти клиента, с автоматической заменой точек на запятые (нужно для автоматических Update запросов к БД Опти), и автоматической отменой некорректного ввода параметров. Ранее при некорректном вводе могли быть исключения.
При этом приходилось восстанавливать БД Опти из автоматически создаваемых Бэкапов.
11.2 Теперь при работе из-под настройщика (обычно при настройке весов или при поверках) появилась возможность регулировать статическую юстировочную поправку, прямо из окна "Статическое взвешивание", причём изменения коэффициента сразу же приводят к изменению веса.
Раньше приходилось перезапускать клиент, что было неудобно если на весах стояли гири.
Для этого добавилась кнопка "Настройка" в окне "Измерения с остановкой"
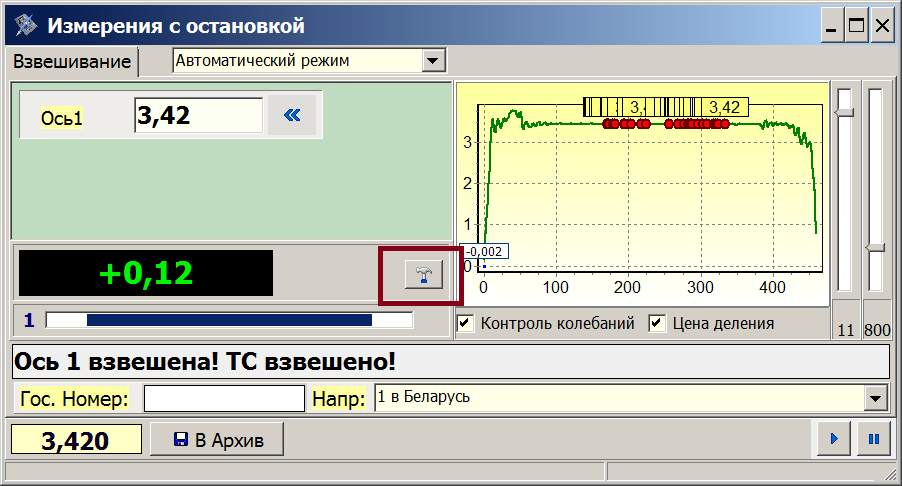
По нажатию кнопки можно попасть сразу в Опти и менять там все необходимые коэффициенты (в частности "Статическая поправка")
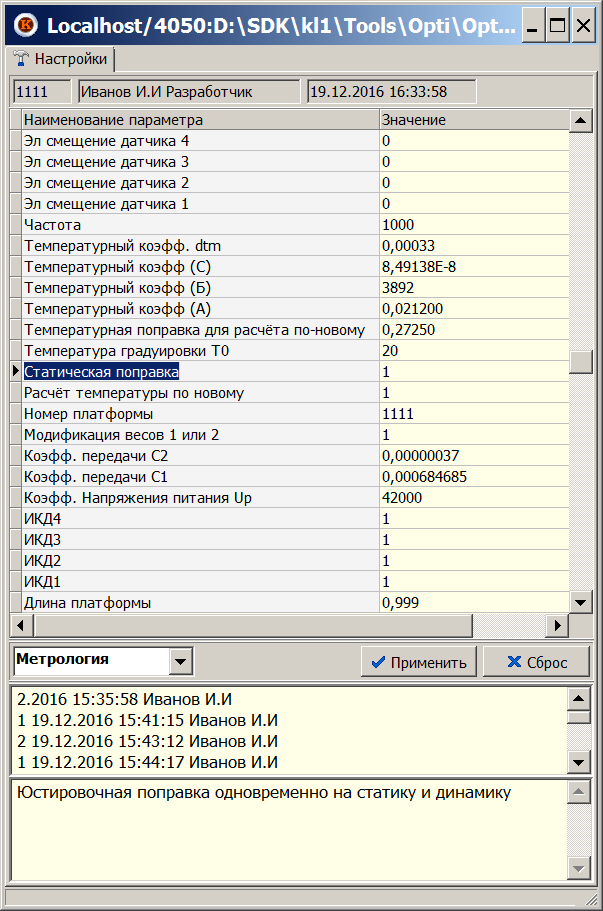
Внимание! Эта опция работает только если в программу был осуществлён вход с правами настройщика!
Ни у оператора ни у начальника, данная опция не работает.
У организаций обслуживающих весы, именной ключ настройщика должен быть, как и у настройщиков "Тензор".
Изменение метрологических параметров можно проводить только в присутствии метролога,
так как автоматически изменятся цифровые проверочные идентификаторы.
Подробнее о процедуре поверки можно прочитать в "Методике поверки".
------------------
Менять надо Klient_Car и файл Opti_000_install.FDB (но с забиванием всех актуальных параметров для данной платформы), на новых весах файл Opti_000_install.FDB будет иметь уже новые параметры по умолчанию.
При наличии доступа по интернету на существующих весах изменить файл Opti_000_install.FDB можно удалённо, по договорённости.
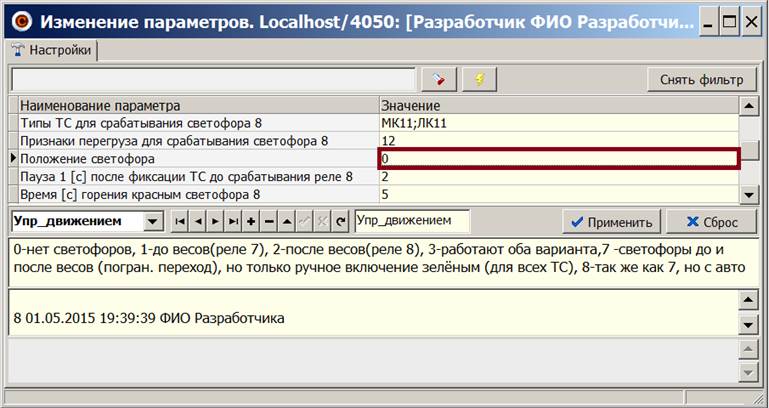
12-02.02.16 Изменения в Server_Car в подсистеме управления движением.
12.1 В настройки добавлена опция Мин вес [кг] первой оси для срабатывания реле 7 (положение светофора 1 или 3)
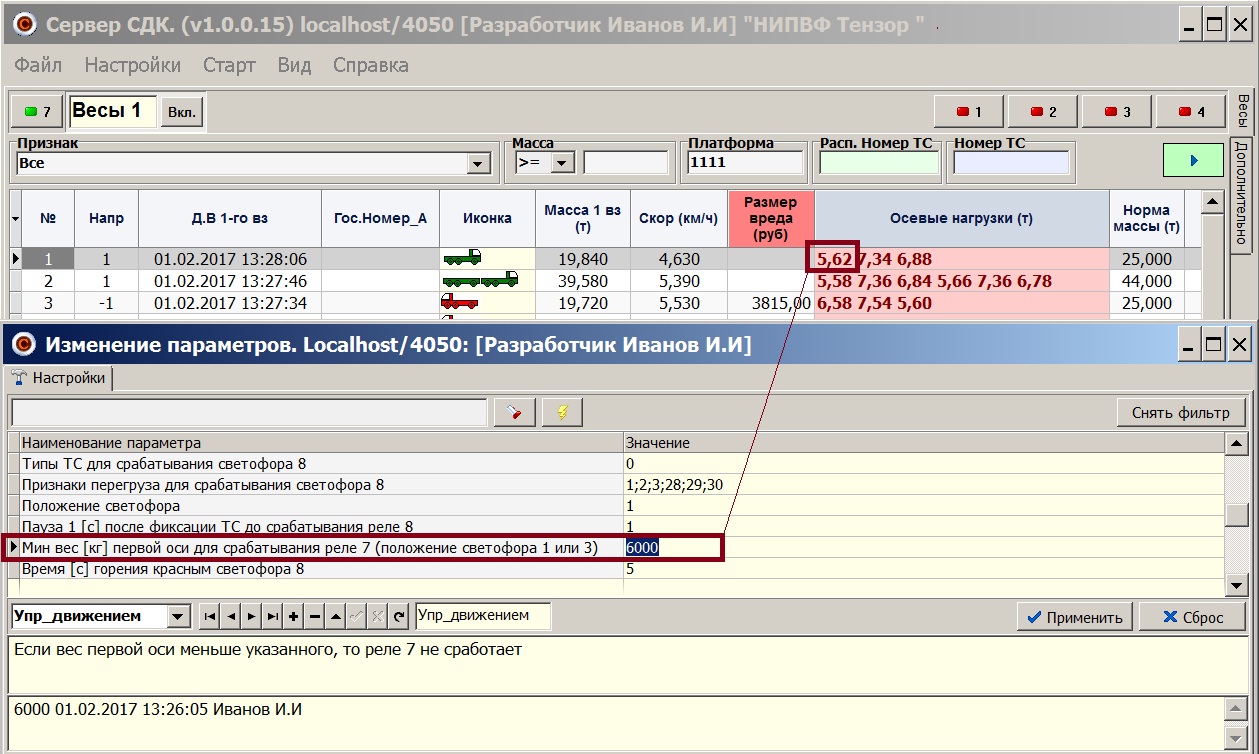
Если выбрано положение светофора 1 или 3, то будет задействовано реле 7, подключённое к светофору или шлагбауму, см. схемы:
http://www.sdkpro.ru:8070/sdkhelp/less/Svetofors/1.html
http://www.sdkpro.ru:8070/sdkhelp/less/SVTF_V1_Do_Vesov/Untitled.html
http://www.sdkpro.ru:8070/sdkhelp/less/SVTF_V3_Do_and_Posle_Vesov/Untitled.html
Раньше при наезде первой оси ТС реле 7 безусловно срабатывало (светофор красный), и оно было включённым вплоть до фиксации веса всего транспортного средства, и это работало для транспортных средств любого веса. Теперь появилась возможность не делать эту процедуру, если первая ось ТС недостаточно весит (а у нас в данный момент только и есть, что приблизительный, не уточнённый вес именно первой оси, машина ещё даже не проехала по весам, а только наехала первой осью). Нижний предел фиксируемых ТС и устанавливает данная опция. Например, если поставить 1000 кг, то на машины с весом первой оси менее 1000 кг, реле и, стало быть, светофор срабатывать не будут, а на машины с весом более 1000 кг, сработают. Этот предел устанавливается эмпирически, исходя из качества трафика и кривых проезда, так как предварительный вес в момент наезда (не уточнённый специальными алгоритмами) обычно имеет значения, близкие к максимуму на осциллограмме проезда, а реальный, фактический вес оси, видимый в программе, будет чуть ниже. Поэтому данное значение подбирается по месту, исходя из текущих условий. Данная опция может быть востребована на переправах, мостах, карьерах, заводах, полигонах и везде, где требуется регулировать данным способом (1 или 3) только проезд грузовых транспортных средств.
12.2 В настройки добавлена опция Включать реле 7 (в зелёный) после фиксации ТС на схемах 1 и 3
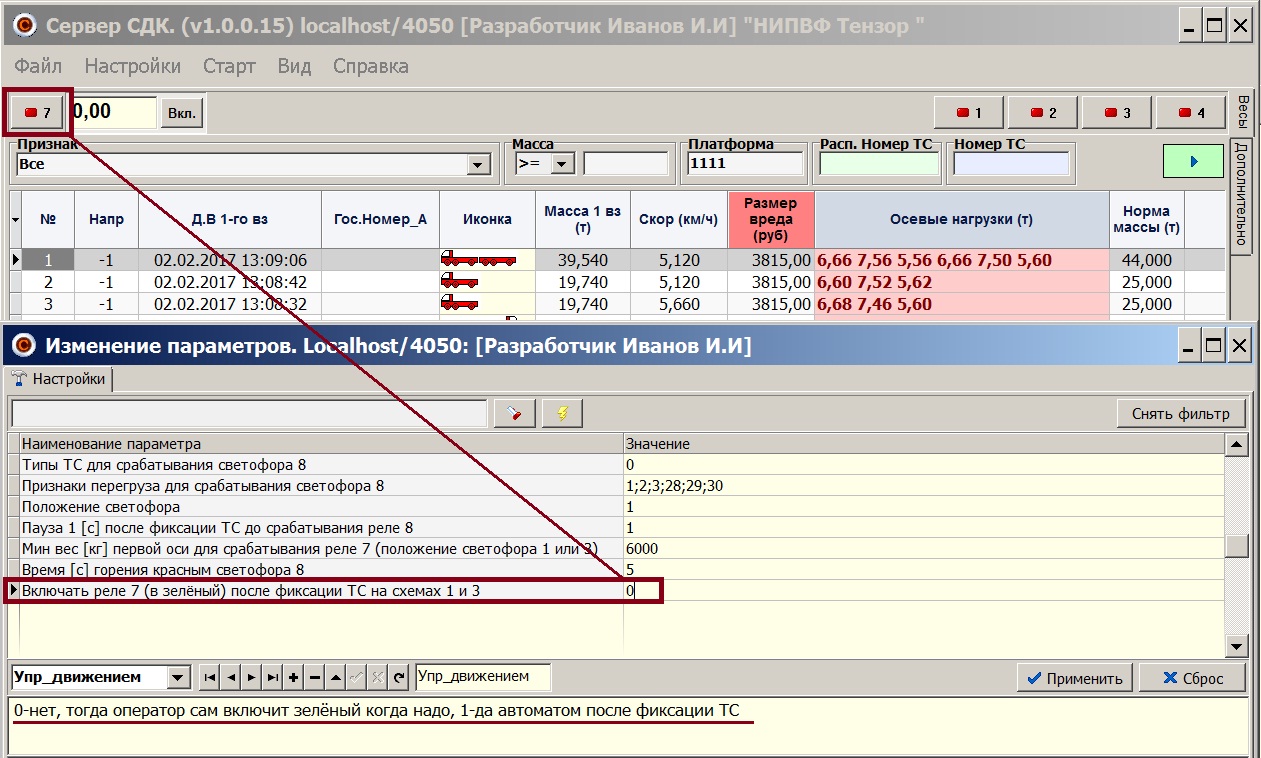
Данная опция для режимов 1 и 3 добавляет возможность не включать светофор зелёным автоматически после фиксации ТС, как сейчас, а оставлять гореть его красным до тех пор пока оператор сам не включит его в зелёный вручную, нажав на соответствующую кнопку (см рис.).
Это может потребоваться если нужно надольше чем время до фиксации, задержать следующий автомобиль, например чтобы дать текущему автомобилю проехать по переправе, мосту, или просто оформить его и выдать акт или накладную.
По умолчанию в этой опции стоит 1, это значит что зелёный включится автоматически после фиксации ТС (полное определение веса, типа, скорости).
Если поставить 0, то после фиксации ТС, зелёный сам не загорится, и его должен будет включить вручную оператор.